Recent Posts
-
Papers to be Presented at IROS 2024
23 Sep , 2024 -

4 Recent Publications in RA-L and ICRA 2024
30 Jan , 2024 -

2 Papers Accepted to IROS 2023
25 Sep , 2023 -

6 Papers Accepted to ICRA 2020
18 Sep , 2020 -
Paper published in IROS 2020
20 Aug , 2020

Teachbot
Robotic education for the workforce
Autonomous Excavation
Revolutionizing the construction industry
Extra Robotic Legs
Enhancing the capabilities of human workers
Mobile Extendable Robot Arm (MERA)
Robotic access to hard-to-reach areas and goals

MIT Growing Robot
Solving the last-foot problem
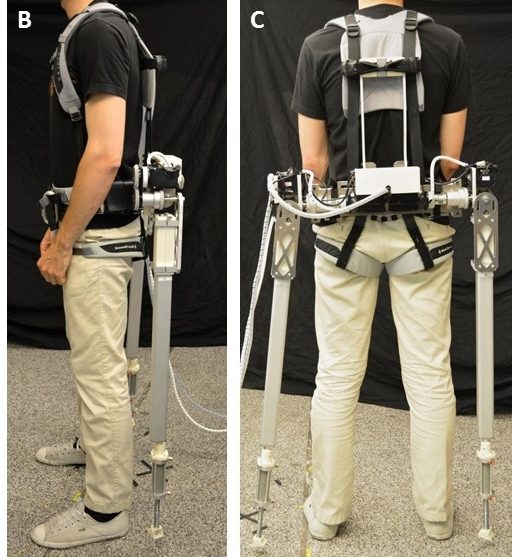
Supernumerary Robotic Limbs
Developing robotic limbs to enhance human mobility

Space Suit Supernumerary Robotic Limbs
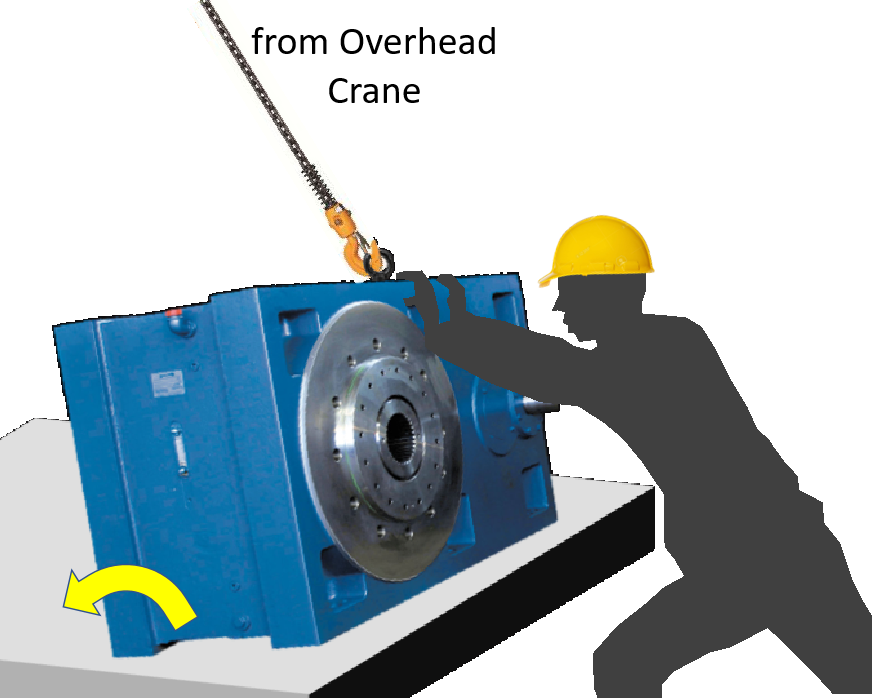
Dexterous Cranes
Automation for Heavy Industries
Two-Body Bot
Assistive robots for eldercare