
Motivation
Extra-Vehicular Activity (EVA) operations are considered the most complex/dangerous tasks conducted by Crew Members during a space mission
- Years of planning and procedure development is spent by Flight Operators to optimize tasks performed during a single EVA
- Great lengths are made to maximize the amount of time spent in a single EVA (to reduce total number of EVAs in a given year)
- Each time a spacesuit is donned/doffed, there are several points of failure that can occur with catastrophic consequences
- Total EVA time is constrained primarily by available oxygen in spacesuit
- Metabolic load of Crew Member is inversely proportional to total EVA time
- With the implementation of SuperLimbs to perform the work of transfer operations in an ISS EVA, metabolic load can be significantly reduced to dramatically increase total EVA time
In a micro-gravity environment, performing typical EVA operations (such as using a hand drill, moving objects, etc.) is far more difficult due to prevalent effect of Newton’s 3rd Law of Motion
- Without a rigid tether, Crew Members must brace themselves while working on hardware or else they will be pushed away from the workspace
- Current industry solutions
- Crew Members brace themselves with one of their arms while performing work
- Crew Members lose use of an arm during critical operations
- Crew Members attach themselves to a foot restraint (tied to the Canadarm)
- Positioning of foot restraint takes time and coordination with ROBO (loss of EVA time)
- Due to large size of Canadarm, foot restraints can be severely limited by geometric constraints of the work area
- Having spacesuit mounted SuperLimbs can enable use of rigid tethers at any location around the ISS immediately

Problem Statement
- Using MIT d’Arbeloff’s lab invested interest in Supernumerary Robotic Limbs, integrate that technology into NASA’s next generation xEMU spacesuit
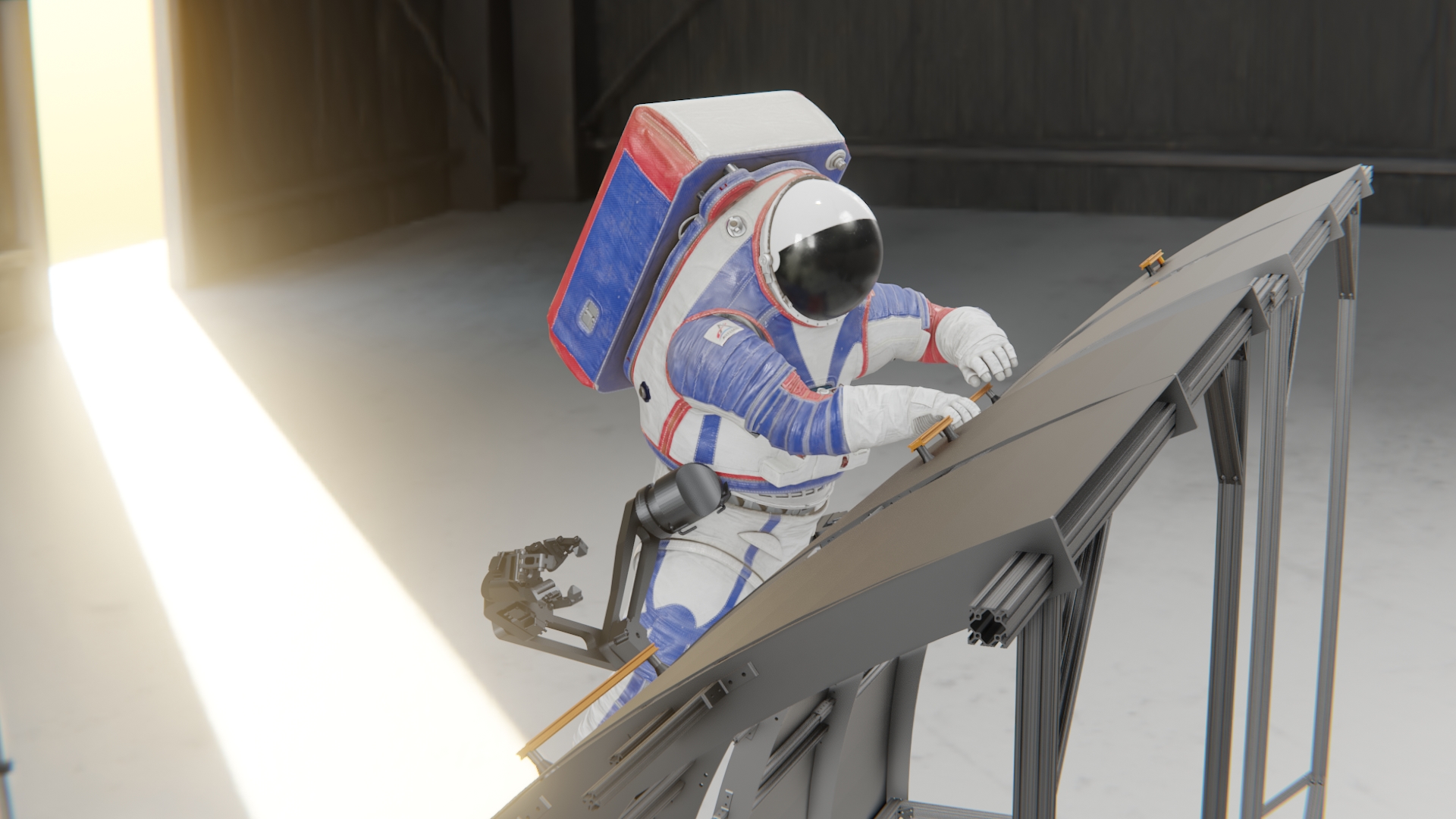
- Primarily utilized to carry Crew Members during transfer operations of ISS EVAs and act as a portable rigid tether
- How can we achieve a cooperative locomotion of the SuperLimbs (acting as a follower) with that of a human user (acting as the leader)?
Design Concept
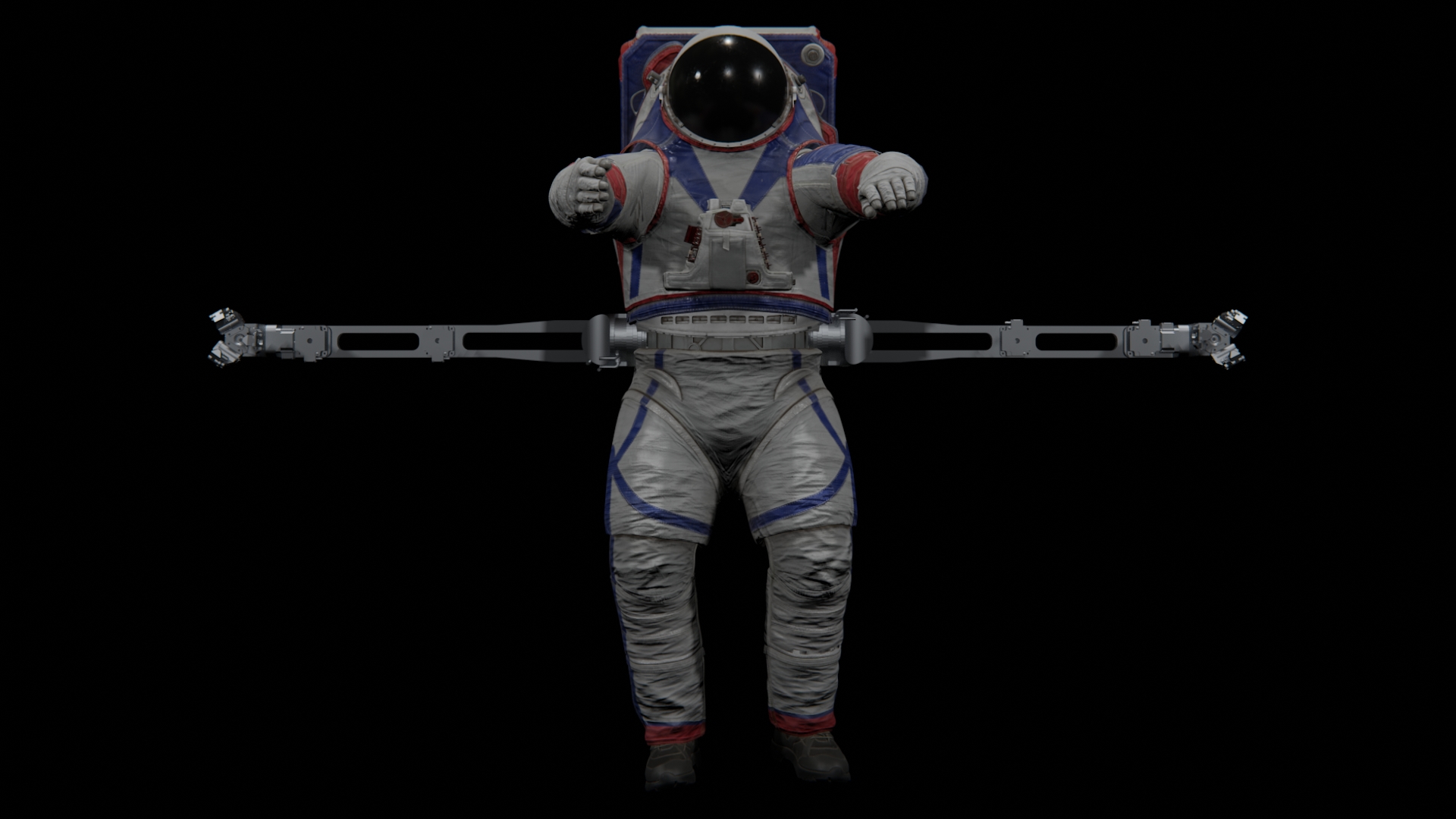
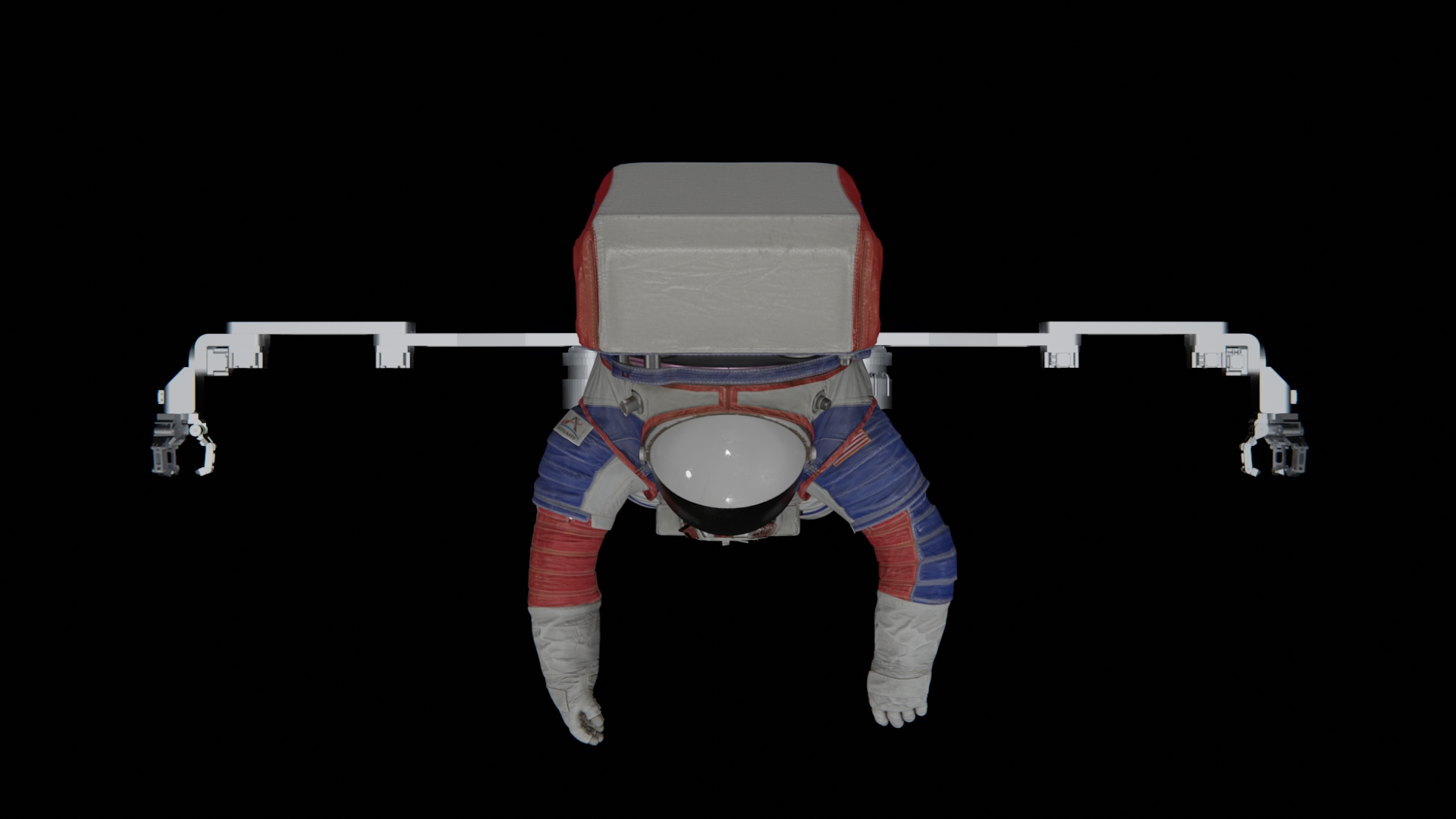
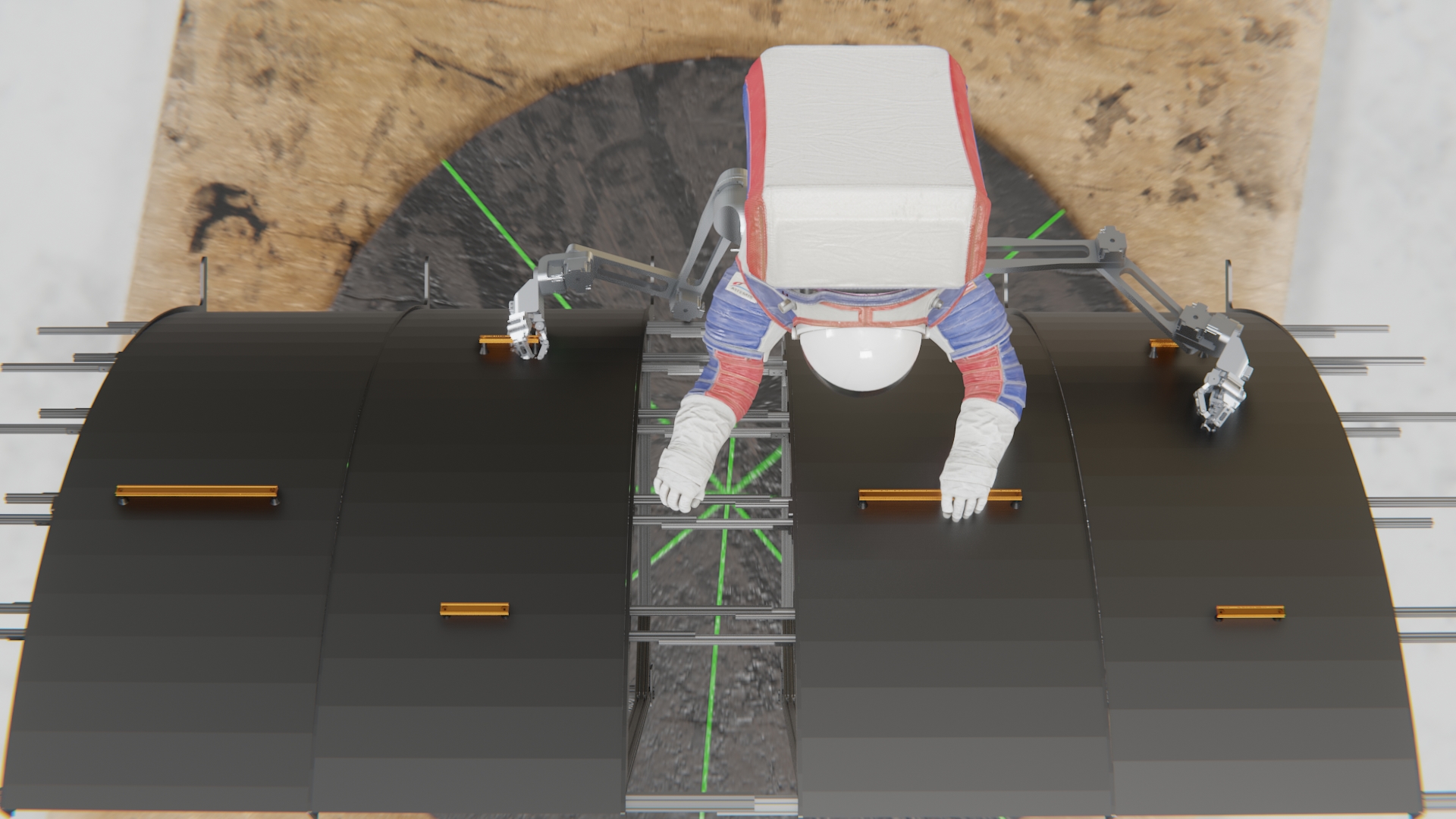
A pair of robot arms are placed around the waist and secured to the base frame of the space suit. Each SuperLimb has a gripper that can securely grab a handrail or other fixtures outside a space vehicle.
- Securely bracing the astronaut body and the space suit; a single SuperLimb forms merely an open-kinematic chain,which is limited in structural strength and load bearing capacity.
- Securely moving across the outside surface of a space vehicle,so that at least one SuperLimb is at all times grabbing a handrail including transitions from one handrail to another.
With this concept in mind, Space Suit SuperLimbs can augment astronaut abilities by offering the following…
- High Energy Consumption Mitigation
- Rigid Tether Utilization
- Lifting/Support Assistance
Design and Implementation
Human-Intention Detection
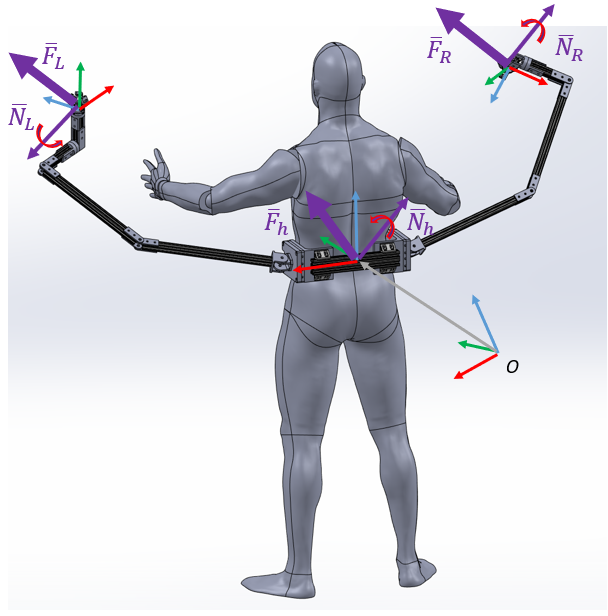
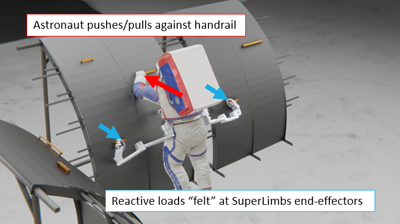
In order to establish an effective human-robotic leader-follower relationship, we must define a novel methodology in allowing astronauts to seamlessly command the SuperLimbs to achieve a desired task. For this specific application, we took inspiration from how astronauts utilize Newton’s 3rd Law of motion to propel themselves during Intra-Vehicular Activities (IVAs). When the astronaut, rigidly fixed to the external structure grabs the structure and pushes/pulls against it, the static balance of the closed-loop kinematic chain causes changes in the forces and torques felt within the SuperLimbs. These changes in forces and torques can be then directly translated into a desired velocity inputted by the astronaut.
Human-Leader Robot-Follower Cooperative Locomotion and Task Planning
In order to create autonomous/cooperative movement from the SuperLimbs, we must assume the astronaut/SuperLimbs system as a quadruped where the SuperLimbs (followers) act as cooperative appendages with that of the astronaut’s arms (leader). We can then solve the statically stable system (given a transient pose) with a space of possible solutions to move/orient the astronaut’s COM in a desired direction (stable push). Each pose taken after each subsequent infinitesimally small movement can be also solved as a series of stable pushes and strung together to create the overall trajectory. With the incorporation of optimization parameters subject to operational constraints on the SuperLimbs (keep-out-zones, singularity avoidance, etc.), the space of possible solutions for each transient pose reduces to a single solution. Additionally, the contact state plays a crucial role in task planning for the trajectory. Certain contact states (point contact, line contact) reduce the overall controllability of the system and should be avoided whenever possible.
Implementation
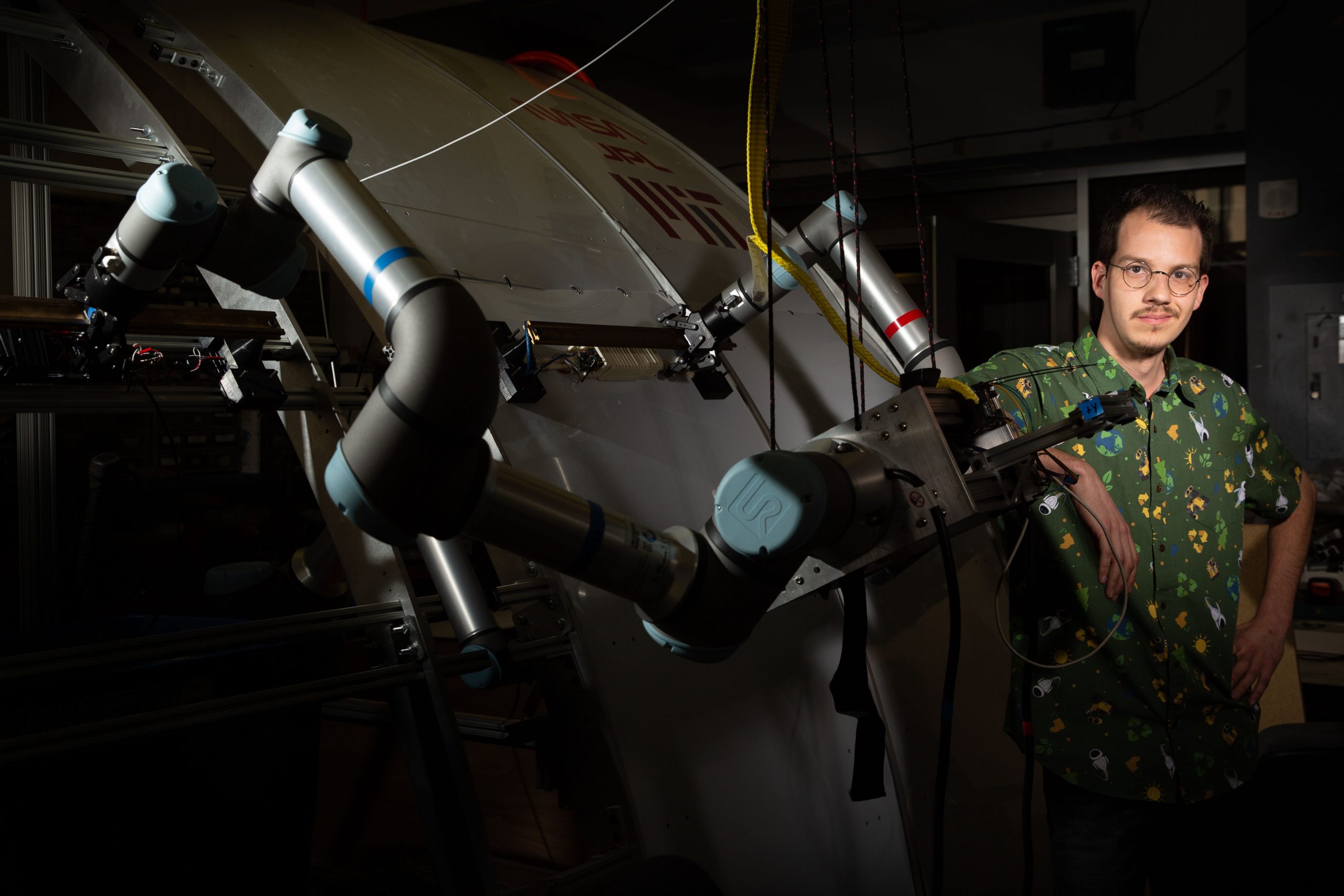
Utilizing two Universal Robots UR5e robots connected to an extruded aluminum frame with a human mannequin rigidly installed, a physical mock-up was developed to tests the claims of this research.
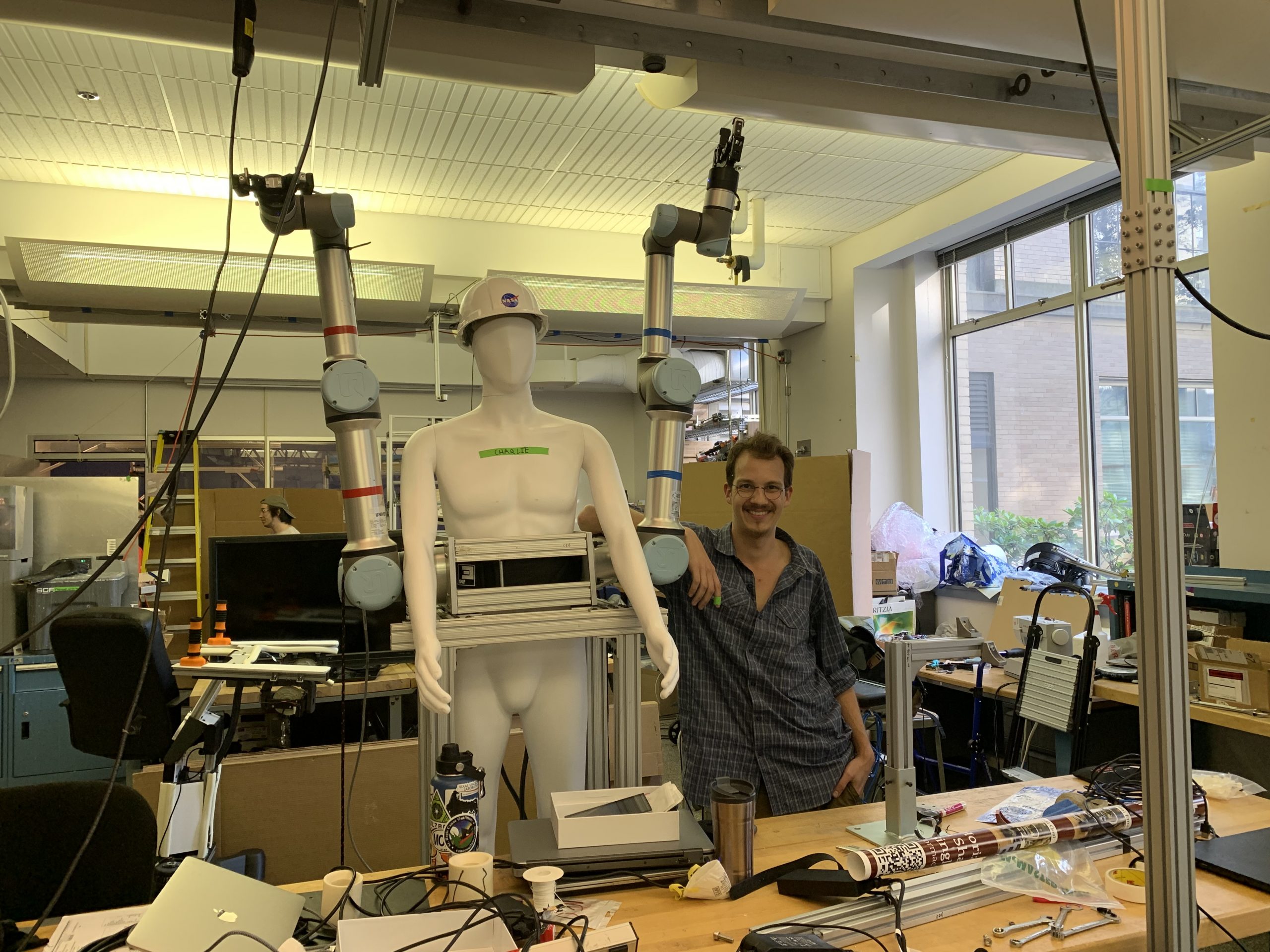

In addition, a full-scale mock-up of an exterior section of the ISS was developed with NASA-STD-3001 compliant brass handrails (each instrumented with load cell arrays) in order to test various postures and solution spaces.


With this hardware, an admittance controller was implemented into the UR5e robots (utilizing the Foxy build of ROS2). (Note: Testing was performed along the inertial X and Z axes due to restoring forces applied by gravity)
Testing consisted of the following…
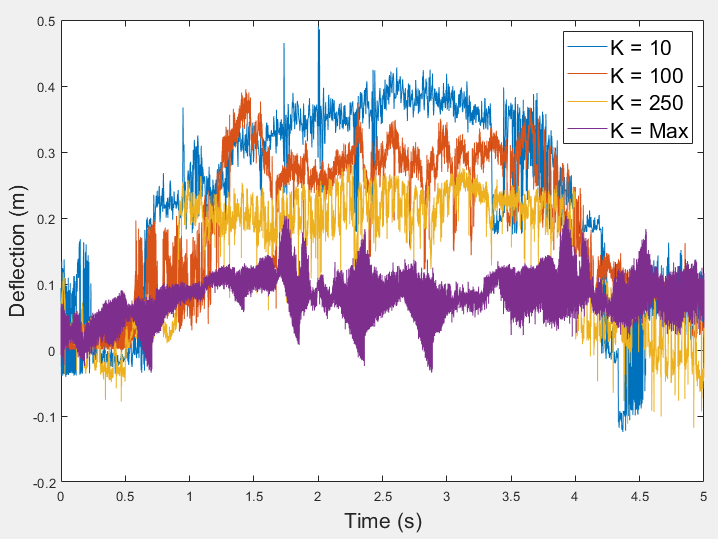
- Measure deflection of human Center of Mass (CoM) for varying levels of stiffness within the SuperLimbs to validate the effects of static bracing
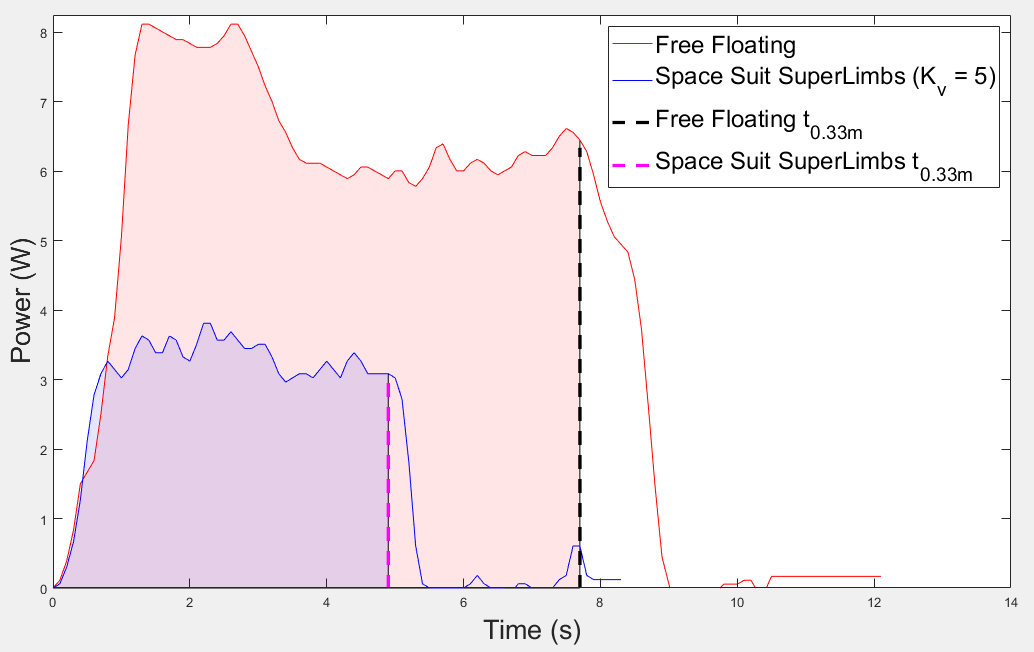
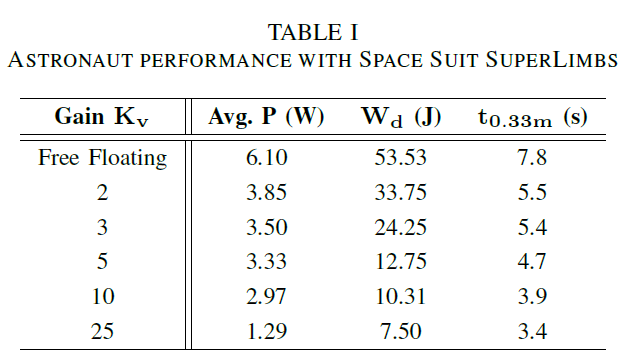
- Measure work applied by a human to translate their CoM for varying admittance gains to validate the SuperLimbs ability to attenuate energy exertion
Simulation was also conducted…
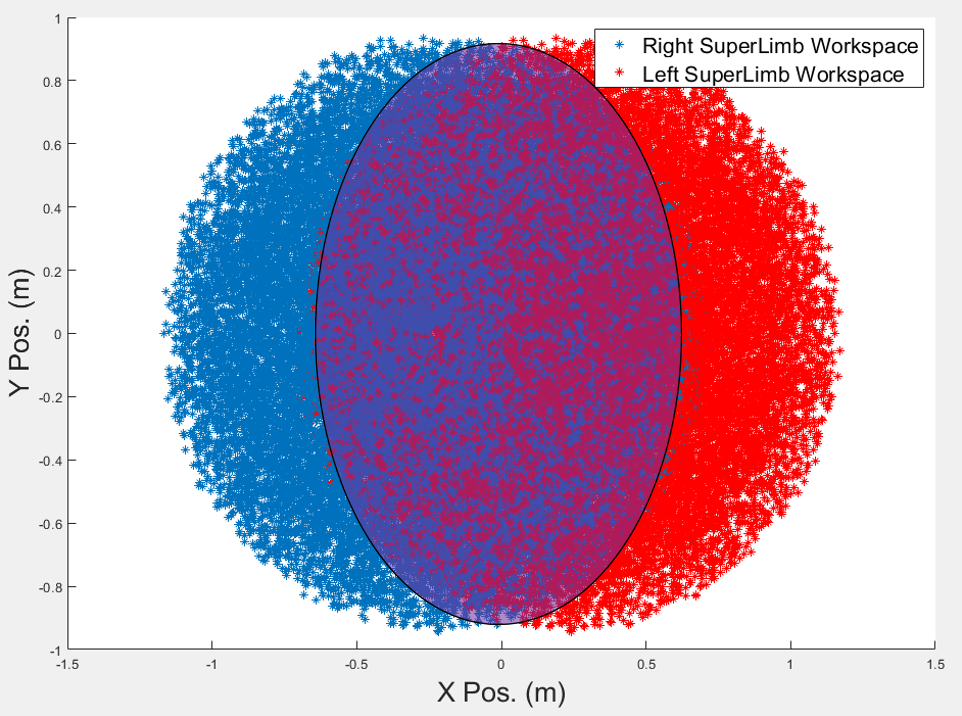
- Measure the amount of available working envelop earned from the rigid tethering of SuperLimbs…
Future Work
Future work is to be placed on alignment with the goals outlined with the NASA Artemis Program. Therefore, efforts will be shifted to maturing this technology towards applications in planetary EVAs, such as on the Lunar or Martian surfaces.
These applications draw immense benefits towards adopting a human-robot hybrid quadrupedal gait to improve energy efficiency during transfer operations. Additionally, SuperLimbs offers a resounding solution to recovering a fallen astronaut to their feet.

