2019 IROS Workshop on
Supernumerary Robotic Limbs
November 4, 2019
The Venetian Macau Resort Hotel, Macau, China
Imagine that one-day humans have a third arm and a third leg attached to their body. The extra limbs will help them hold objects, support the human body, share a workload, and streamline the execution of a task. If the movements of such Supernumerary Limbs are naturally coordinated with their own limbs, the humans may come to perceive the extra limbs as an extension of the body, incorporated into their body image. The goal of the proposed workshop is to bring together researchers and practitioners interested in Supernumerary Robotic Limbs, displaying the state-of-the-art, discussing a broad spectrum of research challenges, and showcasing actual and potential applications of the technology in both industrial and rehabilitation areas.
Supernumerary Robotic Limbs (SRL) are related to two existing types of wearable robots: exoskeletons and prosthetic devices. The former extends the joint strength of the human body by attaching actuators to individual human joints, or passively redistributes the load to other part of the body, or even stores energy. The latter substitutes lost human limbs with mechanical ones. SRL represents a third type of wearable robots. Unlike prosthetic devices, SRL provides extra limbs in addition to the four limbs. Unlike exoskeletons, where active and passive devices are attached to the human body and move together with the body, SRL can move freely, taking a posture different from the human limbs.
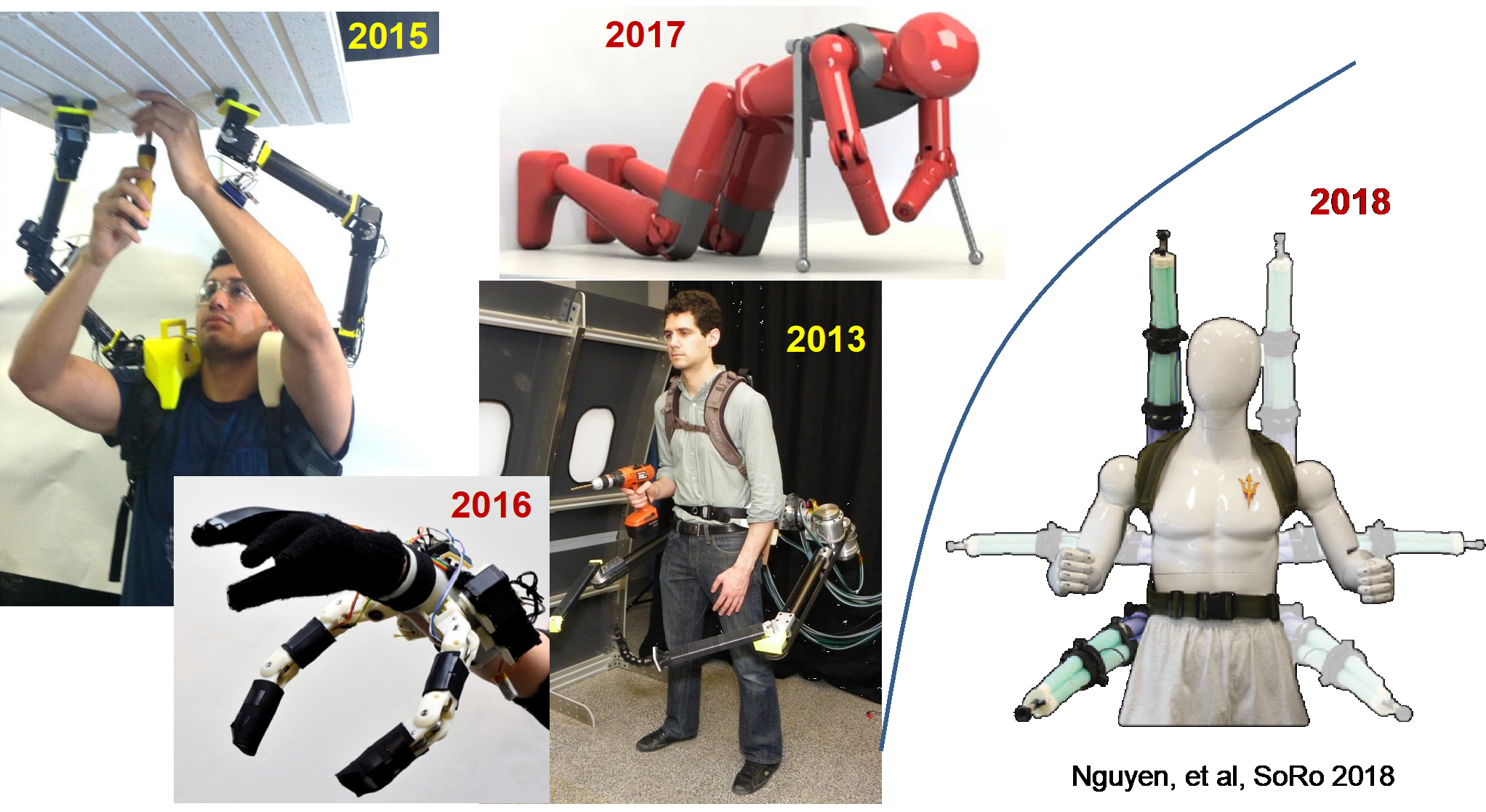
This freedom of SRL can open up new possibilities of wearable robots. When a worker is fixing a light fixture to a ceiling, SRL can hold the light fixture while the worker is setting screws. When a field worker is working on a tall ladder or a dangerous place, SRL can hold a rail or a structure to securely support the human body. When a human has to crouch or crawl in order to work on the ground, SRL can hold the body with its extra arms so that the human neither have to crouch/crawl nor support the upper body with his/her own arms. SRL augments the human capabilities in many ways.
The freedom, flexibility, and new functionality of SRLs come with new technical challenges and scientific questions. How can a human communicate with SRL? How can SRL coordinate its motion with the human? Can a human control SRLs simultaneously with his/her own arms and legs? Does the human brain support SRLs? Can we design a SRL that is comfortably worn for a long time? How can we reduce the weight and size of SRL? Numerous research issues and technical challenges must be addressed. These range from machine design, materials, and control engineering to human-robot systems, biomechanics, ergonomics, brain and cognitive sciences, and neuromotor control.
In this workshop we invite speakers having diverse research activities and a variety of disciplinary backgrounds. These include biomechanics researchers, robot designers, materials scientists, and neuroscientists. We aim to exchange ideas from a broad spectrum of research activities, address fundamental research issues, explore promising applications, and establish foundations of SRL. We expect that the audience will find the proposed workshop useful and inspiring in exploring new research directions and setting new R&D goals.
Harry Asada, Organizer
Massachusetts Institute of Technology
Chenglong Fu, Co-Organizer
Southern University of Science and Technology
Topics Areas
- Design concepts of SRLs / Human augmentation, machine design, ergonomics, wearability
- Human-SRL communication / wearable sensors
- Natural, implicit communication and control / neuromotor control synergy, biomechanics
- Human-SRL gait synchronization and coordination / Dynamic control, stability analysis
- Soft robotics applied to wearable extra limbs / Soft Robotics, robot design, actuators
- Cognitive aspects of SRL / Cognitive load and brain support
Speakers
- Harry Asada, MIT
- Ken Salisbury, Stanford University
- Wenlong Zhang, Arizona State University
- Masahiko Inami, University of Tokyo
- Chaoyang Song, Southern University of Science and Technology
- Yanhe Zhu, Harbin Institute of Technology
Program
| 13:00 | Welcome and Introduction |
| 13:20 | Talk 1 |
| 13:55 | Talk 2 |
| 14:30 | Talk 3 |
| 15:05 | Coffee Break |
| 15:20 | Talk 4 |
| 15:55 | Talk 5 |
| 16:30 | Talk 6 |
| 17:05 | General Discussion |
| 17:30 | End |
Preliminary Presentation Slides
The slide deck of each presentation (Preliminary Version) can be viewed at the following link.
Harry Asada: Asada-IROS-WS-8-19
Wenlong Zhang, Arizona State University: Part 1: Pat-1-SoftPolyLimb2, Part 2: Part-2-SoftPolyLimb2
Masahiko Inami, University of Tokyo: 190702 IROS2019 Workshop Masa Inami
Chaoyang Song, Southern University of Science and Technology: 190710-RoboticCane
Yanhe Zhu, Harbin Institute of Technology: Series-Parallel Reconfigurable Supernumerary Robotic Limbs – Yanhe Zhu – HIT