As the world’s population continues to age, our goal is to design novel robots, techniques, and models to improve care for elderly persons. This project consists of several thrusts led by different graduate students, which are as follows:
- Sit-to-Stand Assistance
- Handle Anywhere and Two-Body Bot: Mobile Robots for Postural Assistance
- Untippable Walker
Sit-to-Stand Assistance
Graduate Student: John Bell
Problem Statement
The sit-to-stand transition is a key activity of daily living which many elderly people require the assistance of a caregiver to perform. Due to caregiver shortages in the workforce and the increased risk of mass infection potentially caused by in-person caregiving, it is important to develop a solution that allows elderly patients to receive assistance in the sit-to-stand transition without the required presence of a human caregiver. Such a solution should work collaboratively with the elderly patient, such that the patient is never forced to perform a motion they do not wish to perform, and so that the patient is properly supported.
Our Research Solutions
We are working on the development of a sit-to-stand assistance robot, which will ultimately serve as the basis for a walker robot. Key to the development of such a robot are:
- Methods for effectively establishing mutual understanding between robot and human
- The mechanical ability to gently support the elderly patient’s weight through the sit-to-stand transition
Each of these key questions are being addressed by a different aspect of the project:
Dual-Motor Actuator Development
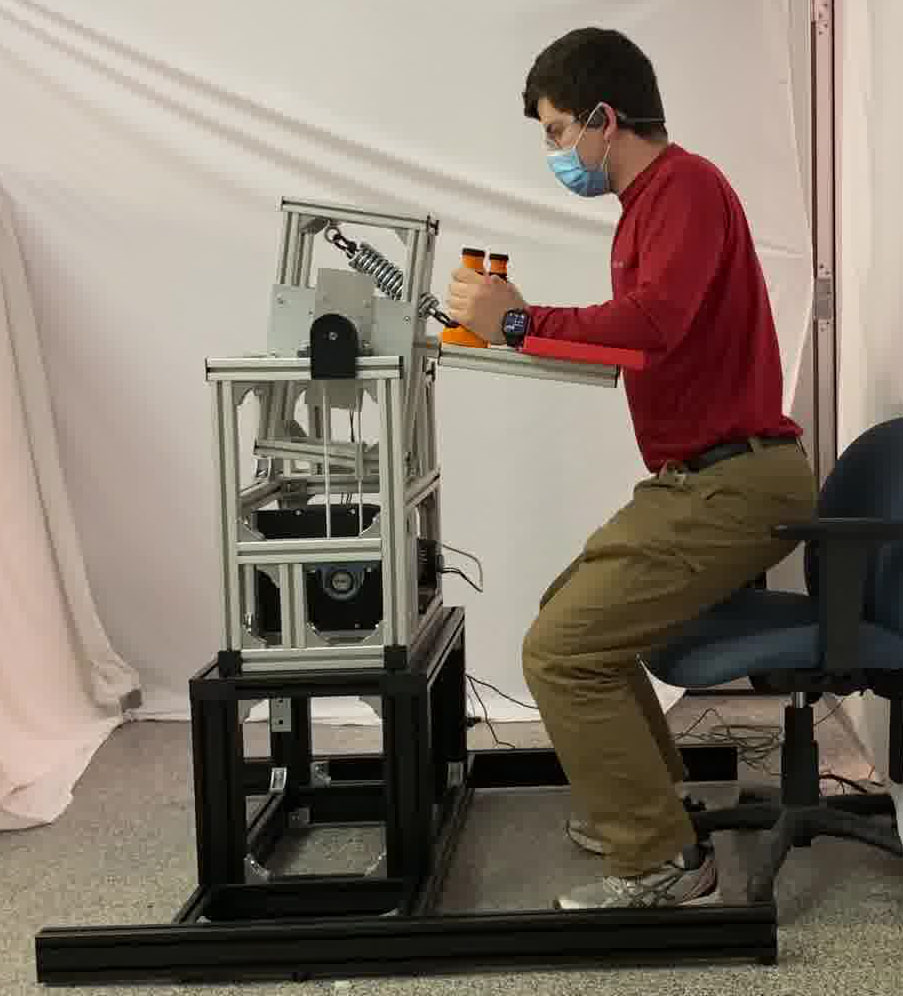
One aspect of the project is focused on development of a design of dual-motor actuator which is used to lift the full or partial weight of the elderly patient through the sit-to-stand transition. This dual-motor actuator is designed to support high bias loads at low frequencies of feedback control, but also to possess high-fidelity feedback control at high frequencies, which can be used to apply high-frequency cues to the user or actively damp vibrations.
The image on the right shows the current prototype of the dual-motor actuator, powering a rudimentary lifting mechanism.
Human–Robot Communication and Mental State Estimation
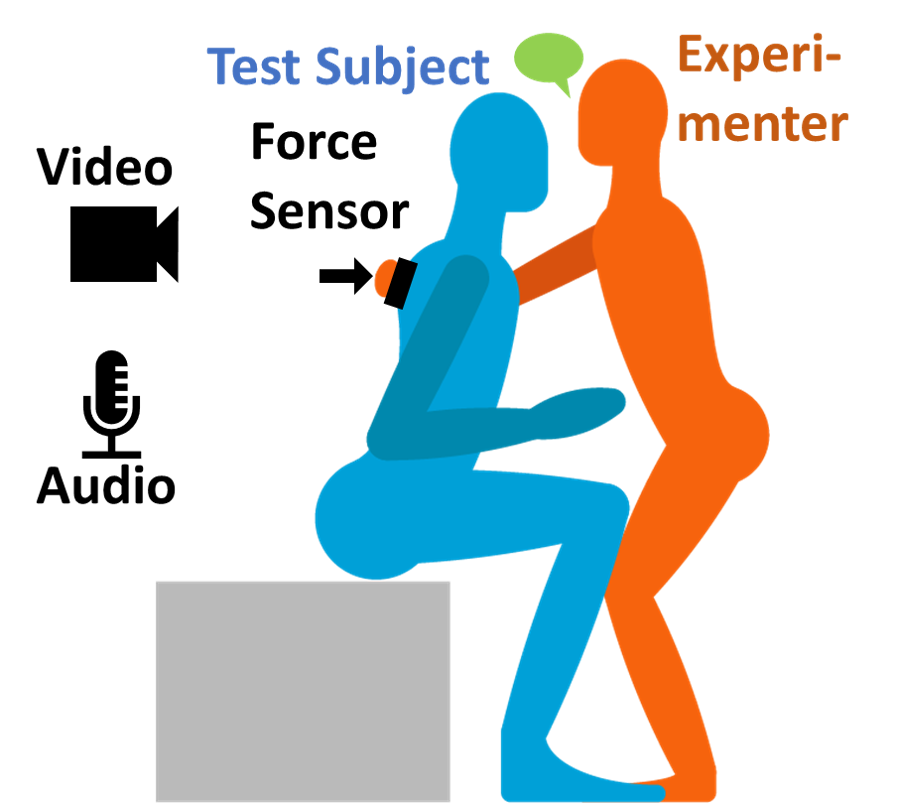
The other aspect of the project is focused on how a robot can estimate the mental state of a human, as well as on how a robot can effectively use cues and other communication methods to convey recommendations and requests to the human user. Key to this aspect of the project are human subject experiments, focused on:
- Characterizing the response of a human to applied cues and instructions when possessing different basic mental states. This can be used to develop models which estimate mental state from behavior.
- Testing the effectiveness of different cues, communication methods, and instructions from robot to human, to both precede the sit-to-stand transition and guide its motion.
Handle Anywhere and Two-Body Bot: Mobile Robots for Postural Assistance
Graduate Student: Roberto Bolli
Research Goals
- Expand the notion of grab bars beyond fixed installations by the use of a mobile robot that can place a handlebar at any location in the home.
- Develop a methodology to optimally place the handle to provide the maximum support for the elderly user while performing common postural changes.
- Discover any correlations between an elderly person’s preferred handlebar pose and various demographic indicators, self-rated mobility for tasks requiring postural change, and biomechanical markers.
- Based on feedback from elderly people and care professionals, develop a novel two-body robot structure, consisting of two small-footprint mobile bases connected by a four-bar linkage onto which handlebars are mounted.
- Create a control scheme for the two-body robot, which is also generalizable to all robots with two nonholonomic mobile bases connected by a coupling mechanism.
Summary
Age-related loss of mobility and an increased risk of falling remain major obstacles to independent living. Many elderly people lack the coordination and strength necessary to perform household activities unassisted, such as getting out of bed or stepping into a bathtub. A traditional solution is to install grab bars around the home, such as a bathroom wall. However, they are often too far to reach and stably support the user; the installation locations of grab bars are constrained by the room layout and are often suboptimal.
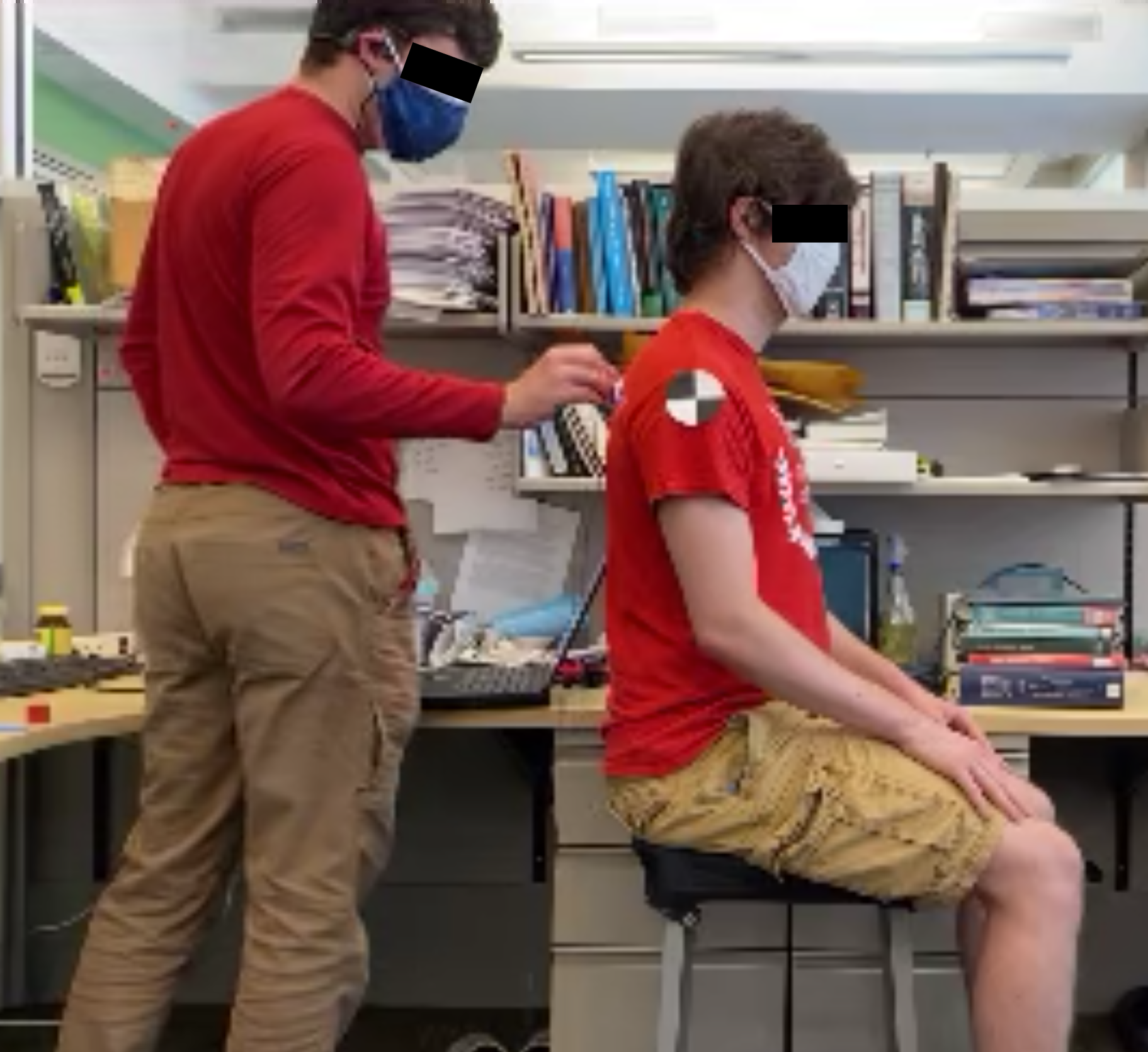
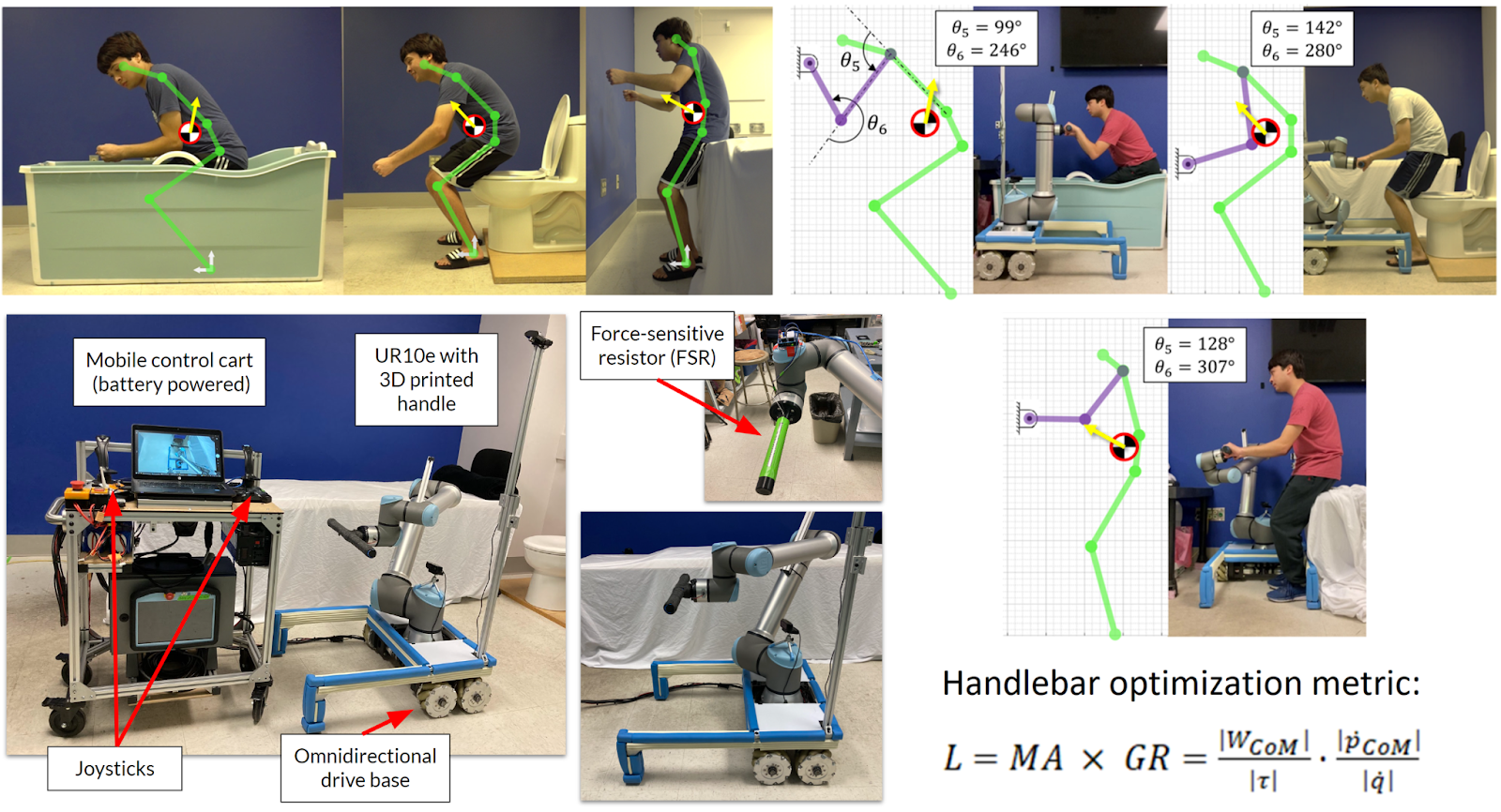
We developed a mobile robot that can place a handlebar at any location, called “Handle Anywhere”. The robot consists of an omni-directional mobile base attached to a robot arm, instrumented with a handlebar. To optimally locate the handlebar for any given postural change, a cost function with a trade-off between mechanical advantage and manipulability of the user’s arm was optimized in terms of the location of the handlebar relative to the user. This methodology required only a sagittal plane video of the elderly user performing the postural change, and thus was rapid, scalable, and uniquely customizable to each user.
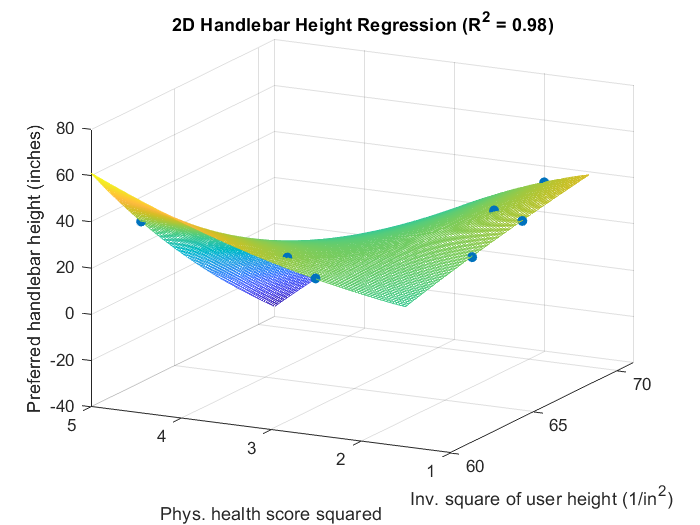
We additionally conducted a study in elderly people to see if there were any correlations between an elderly user’s preferred handlebar pose and various demographic indicators, self-rated mobility for tasks requiring postural change, and biomechanical markers. For simplicity, we considered only the case where the handlebar was positioned directly in front of the user, as this confined the relevant body kinematics to a 2D sagittal plane. This data-driven approach complemented the cost function described earlier by assessing handlebar locations using data from actual elderly people.

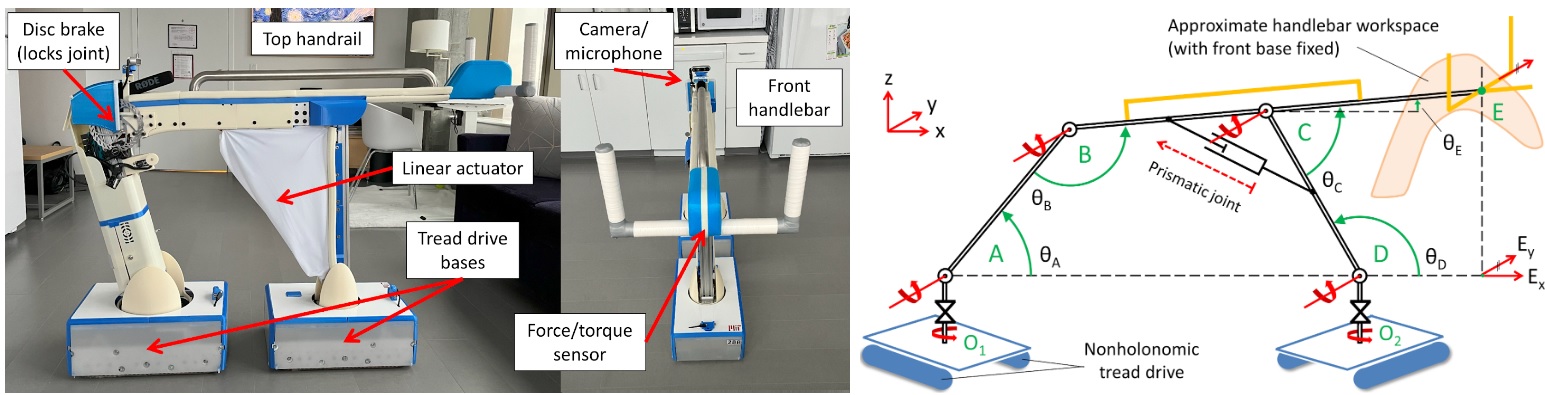
Lastly, based on feedback from the Handle Anywhere robot, we developed a novel multi-body robot (called the Two-Body Bot) consisting of two small-footprint mobile bases connected by a four bar linkage where handlebars are mounted. Each base measures only 29.2 cm wide, making the robot likely the slimmest ever developed for mobile postural assistance. Through kinematic analysis, it was shown that the two-body structure can bear the entire weight of a human body, meeting required load bearing specifications as a handlebar. We developed a leader-follower control scheme, generalizable to all robots with two nonholonomic mobile bases connected by a coupling mechanism, in which the bases are linked by a virtual spring. We also came up with various enhancements to waypoint tracking and dead reckoning that allow the robot to smoothly and accurately follow a series of waypoints.
We hope to employ our robots to reduce the incidence of falls and assist elderly people with activities that require postural changes.
Major Findings
- In experimental trials of three activities of daily living, our calculated handlebar locations were successful at offloading a significant portion of body weight and reducing the perceived effort required to perform each activity.
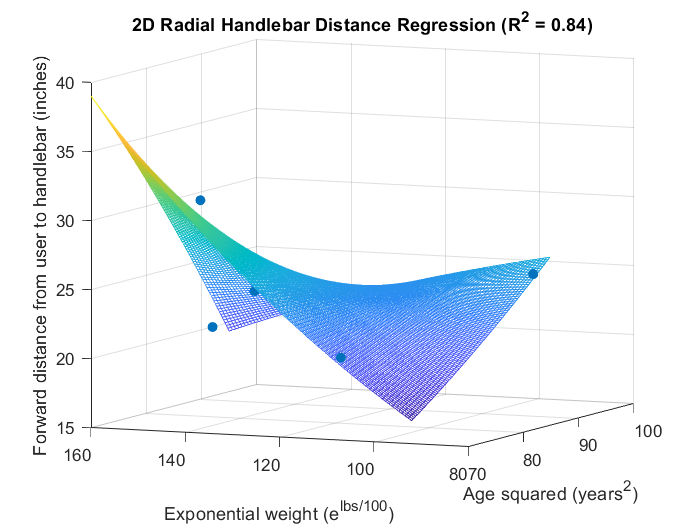
- For linear regressions with two variables, we saw a very strong correlation (R2 = 0.98) between handlebar height, user height and physical health score. The radial handlebar distance did not have quite as strong of a correlation, reaching a maximum R2 value of 0.84 with age and weight. Thus, it appears that it may be possible to predict an elderly person’s preferred handlebar radial distance and height using just four variables: age, weight, height, and self-rated physical health.
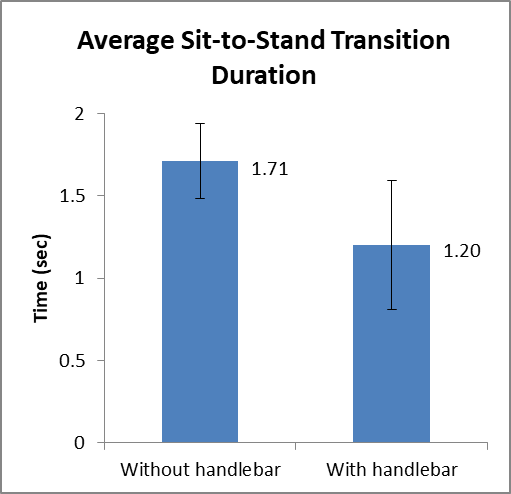
- There was also a statistically significant decrease in the average time to perform a sit-to-stand transition when the elderly persons used a frontal handlebar at their preferred height. The perceived difficulty on a scale of 1 to 5, with 1 being the easiest, decreased from 1.67 to 1.0. Six out of eight elderly persons said that the handlebar made it easier for them to stand up, and the other 25% had no problem standing up without the handlebar.
- Successful teleoperation of the Handle Anywhere robot and the Two-Body Bot, including navigating between doorways, desks, and other obstacles.
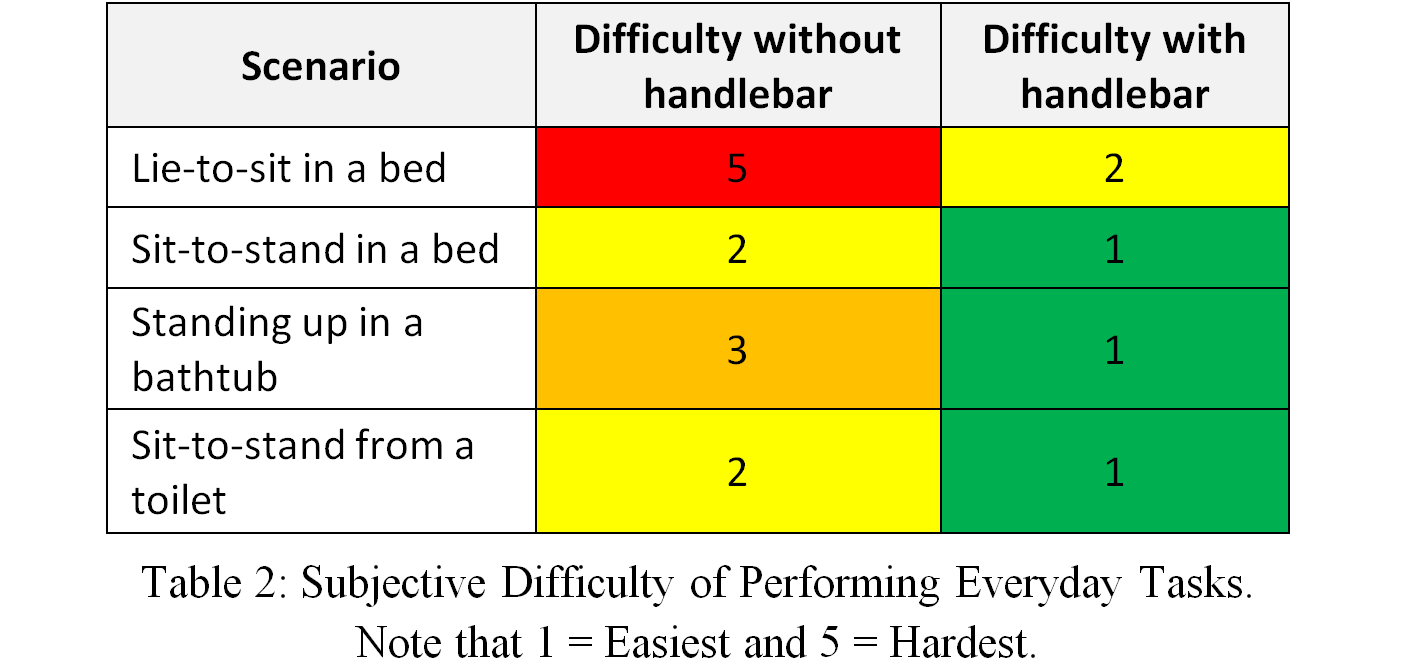
- Common household scenarios, reflecting the activities that elderly people have difficulty performing, were enacted with an adult subject to test the Two-Body Bot’s physical and haptic support. In each situation, the robot was able to provide postural assistance as intended, and decreased the subject’s perceived effort for performing the task. Additionally, the frame successfully spanned household objects such as a coffee table, and extended the handlebar over the lip of a bathtub.

- Five of nine elderly persons surveyed were open to using the Two-Body Bot in their home, suggesting a receptive market for adoption. The others didn’t require home assistance or expressed concerns about reliability.
- To our knowledge, the two-body robot design is unique in eldercare and is both the slimmest eldercare robot and the only one able to support the weight of a human far from the base of the robot.
Supplemental Videos
In-Depth Demonstration and Explanation of the Two-Body Bot – https://youtu.be/qhgTc7tlWPY
Handle Anywhere Teleoperation Demonstration – https://youtu.be/Ty6lY6TeCXw
Publications and Patents
- R. Bolli and H. Asada, “Enhancing Elderly Mobility: A Sturdy, Two-Body Robot for Handlebar Placement in Any Location,” in IEEE Robotics and Automation Letters, vol. 9, no. 3, pp. 2654-2661, March 2024, doi: 10.1109/LRA.2024.3359549.
- R. Bolli, P. Bonato and H. Asada, “A Handle Robot for Providing Bodily Support to Elderly Persons,” 2023 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Detroit, MI, USA, 2023, pp. 122-129, doi: 10.1109/IROS55552.2023.10341348.
- R. Bolli and H. Asada, “A Data-Driven Approach to Positioning Grab Bars in the Sagittal Plane for Elderly Persons,” Late-Breaking Report, 2023 32nd IEEE International Conference on Robot and Human Interactive Communication (RO-MAN), Busan, South Korea, 2023.
- R. Bolli, V. Evian, P. Bonato, and H. Asada, “A Handle Robot for Providing Bodily Support to Elderly Persons: Experimental and Simulation-Based Biomechanical Analysis of Assisted Postural Changes,” Poster at the Foundational Research in Robotics (FRR) & National Robotics Initiative (NRI) Principal Investigators’ Meeting, 2023.
- R. Bolli et al. “Systems and Methods for Supporting a User”. U.S. provisional patent application, serial no. 63/581,615. Filed on 09/08/2023.
- H. Asada and R. Bolli. “Handle – Anywhere: Reconfigurable, Relocatable Handles / Rails for Supporting Elderly and Disabled People.” U.S. provisional patent application, serial no. 63/508,897. Filed on 06/18/2023.
Untippable Walker
Graduate Student: Emily Kamienski
Problem Statement
Many elderly people suffer from serious fall injuries despite using a walker. This is because walkers can tip over during a fall or the person can lose their grip on the walker, and lose all support benefits. Other mobility aids, such as gait trainers, have a larger footprint and are harder to tip over. But these devices are not suitable for home use due to their large size, which severely limits their maneuverability.
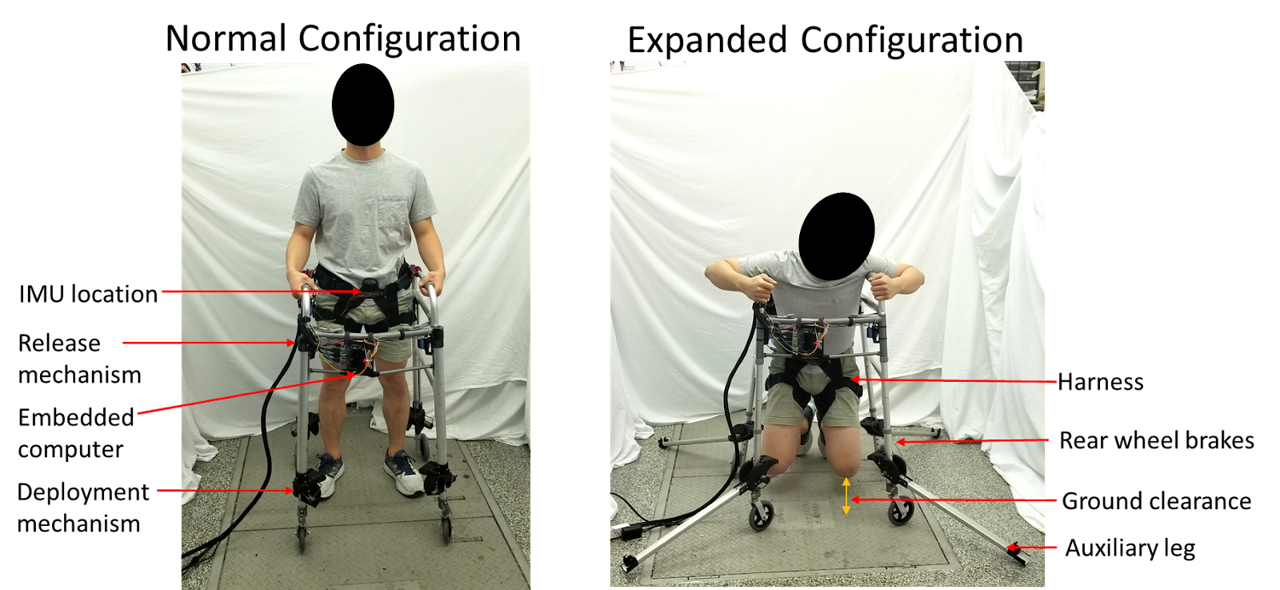
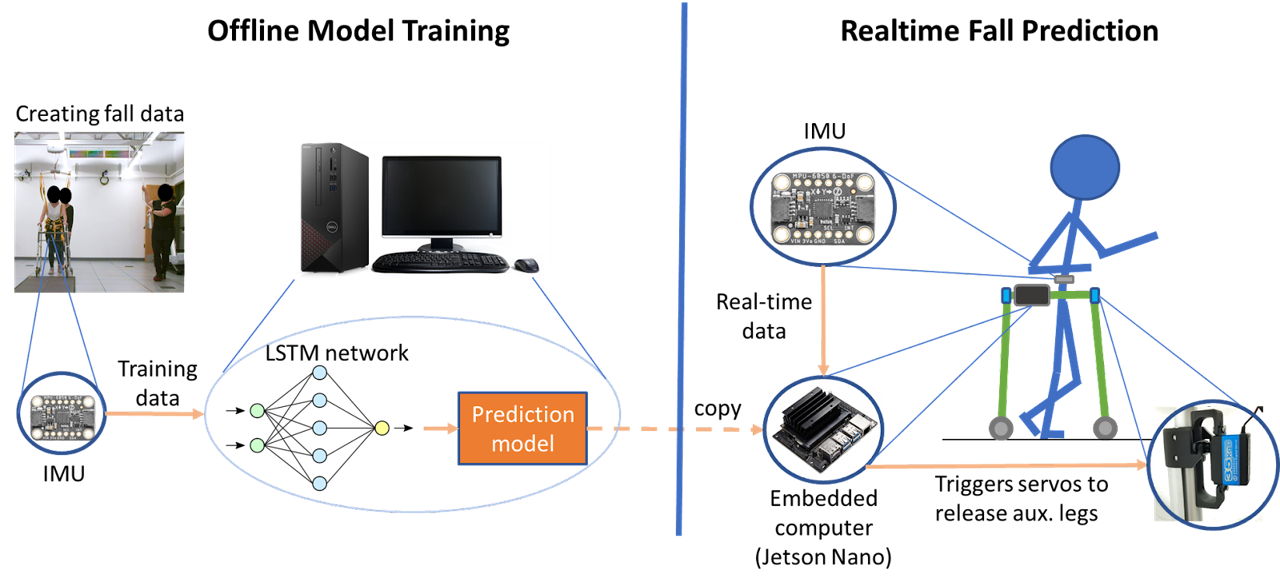
Our Research Solution
We are developing a reconfigurable walker that can support the user and quickly transition between a compact maneuverable configuration, and a more stable configuration if an eminent fall is predicted. The user is constantly monitored via wearable sensors, whose data is fed into a prediction algorithm to determine the real-time fall risk. Once a high risk of falling is predicted, the walker will rapidly expand its base of support (BOS), creating a more stable walker configuration that is untippable. Additionally, the user is attached to the walker frame via a harness so that they can be supported.