Corresponding Author: Cormac O’Neill (croneill at mit.edu)
Traditional robot manipulators are ill-suited for the automation of assembly and manufacturing tasks that require the manipulation of especially large and heavy payloads. With labor shortages impacting manufacturing industries around the world, our research seeks to develop approaches that would allow for the automation of heavy industry’s manipulator of choice: the gantry crane.
Gantry cranes are a cost effective way to move heavy objects across a large workspace, when compared to more traditional rigid-link robot manipulators. However, the unidirectional load-bearing capacity of cables results in cranes being severely underactuated. Our work is focused on developing novel mechanical and controller designs that allow for underactuated cable systems – such as cranes – to perform dexterous manipulation tasks. Of particular interest in prior work has been how cranes can exploit contact between their payload and the environment in order to expand their manipulation capabilities.

Inserting a ring onto a horizontal shaft is necessary for such tasks as attaching an excavator’s sprocket onto an axle. 
A minimal suite of sensors can allow for the correction of misalignments between the ring and shaft.
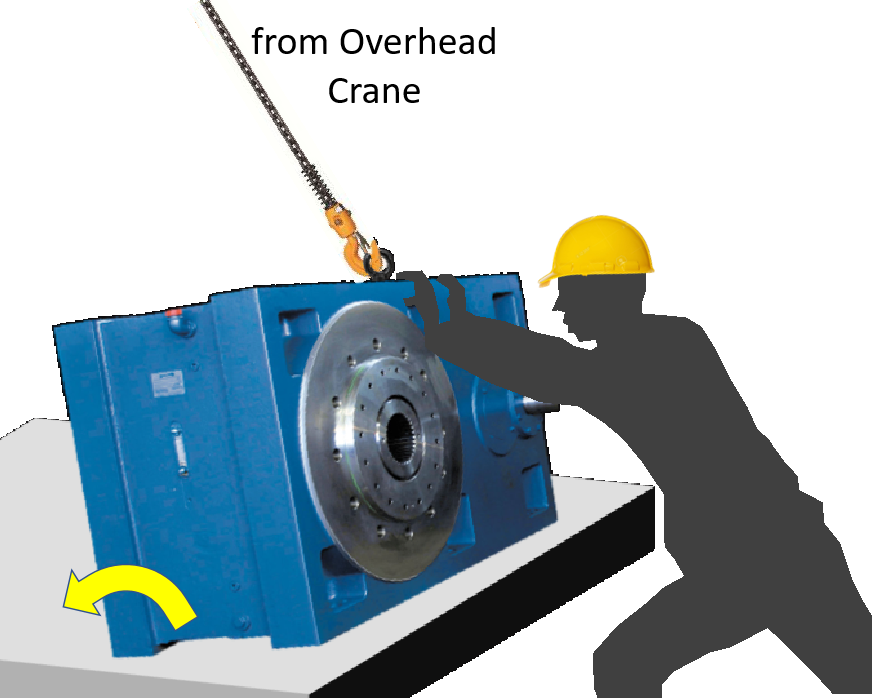
Worker-crane teams are necessary to perform tumbling operations, when an object is pivoted about an edge in contact with the ground. 
A pair of cables allows for a crane to complete a tumbling process on its own, while meeting a set of stringent safety requirements.
Publications
- C. O’Neill and H. H. Asada, “Safe Tumbling of Heavy Objects Using a Two-Cable Crane,” in IEEE Robotics and Automation Letters, vol. 6, no. 2, pp. 1082-1089, April 2021, doi: 10.1109/LRA.2021.3056029. The contents of this paper were also selected by the ICRA 2020 Program Committee for presentation at the conference.