Human 2.0: Vision and Technical Challenges
Hugh Herr
Associate Professor of Media Arts and Sciences, Massachusetts Institute of Technology
 Abstract: The workshop explores the emerging science of human augmentation, covering principles underlying current and future technologies for cognitive, social-emotional and physical augmentation. Workshop lectures examine the use of anatomical, biomechanical, neuro-mechanical, biochemical and neurological models of the human body to guide the designs of augmentation technologies for persons with either unusual or normal physiologies that wish to extend their capability to new levels. Topics include robotic exoskeletons, external limb prostheses, neural implant technology, social-emotional prostheses, and cognitive prostheses.
Abstract: The workshop explores the emerging science of human augmentation, covering principles underlying current and future technologies for cognitive, social-emotional and physical augmentation. Workshop lectures examine the use of anatomical, biomechanical, neuro-mechanical, biochemical and neurological models of the human body to guide the designs of augmentation technologies for persons with either unusual or normal physiologies that wish to extend their capability to new levels. Topics include robotic exoskeletons, external limb prostheses, neural implant technology, social-emotional prostheses, and cognitive prostheses.
Recovery of Function after Severe Spinal Cord Injury by Spinal Stimulation
Joel Burdick
Professor, California Institute of Technology
Abstract: The first half of this talk will review the efforts of a team of UCLA, Caltech, and Univ. of Louisville researchers to use epidural spinal stimulation to recover lost motor and autonomic function in severe spinal cord injured patients. The second half will summarize recent work where we have demonstrated a non-invasive spinal stimulation approach to achieve similar recoveries. This part of the talk will also review new machine learning algorithms that tune the stimulation therapy to each patient, and our ongoing efforts to integrate spinal stimulation, exoskeleton assist, and the machine learning algorithms into an integrated and adaptive therapy platform.
Supernumerary Robotic Limbs: Wearable extra limbs can be conceived as an extension of the human body
H. Harry Asada
Ford Professor of Engineering, Massachusetts Institute of Technology
Abstract: Imagine that one day, you have a third arm and a third leg attached to your body. The extra limbs will help you hold objects, support your body, share a workload, and streamline the execution of a task. If the movements of such extra limbs, called Supernumerary Robotic Limbs (SRL), are tightly coordinated with your own arms, you may come to perceive the extra limbs as an extension of your body, incorporated into your body image. The objective of this talk is to address technical challenges for transforming robots to act as parts of a human body. Wearable SRLs are opening up new horizons of robotics, posing diverse research issues and challenges ranging from machine design and human-robot coordination, to biomechanics, motor control, and machine learning and perception.
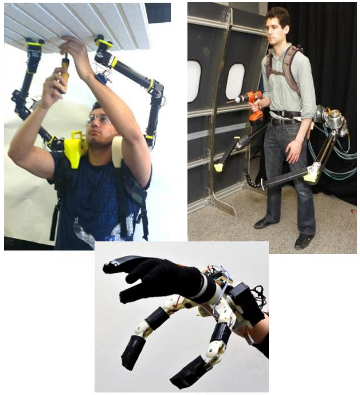
Three types of Supernumerary Robotic Limbs being built at the d’Arbeloff Lab of MIT will be presented: 1) a lightweight robot sitting on the shoulder of a human for lifting and supporting objects in the overhead area, 2) a seven-fingered hand (5 fingers + 2 robotic fingers) for grasping and manipulating large/odd-shaped objects, and 3) a pair of wearable canes attached around the waist for supporting and bracing the human body. For these wearable robots, communication and coordination with the human is the key challenge. Two aspects of coordination control will be presented. First, the concept of biological synergies is applied to the seven-fingered hand in order to control the two robotic fingers in concert with the five human fingers. Through grasp experiments and data analysis using Principal Component Analysis it will be shown that synergies exist for seven-fingered hands as well as for five-fingered hands. For real-time control, Partial Least Squares (PLS) regression is used for extracting control laws from the data that can best correlate the posture of the two robotic fingers to that of the five human fingers. Second, it will be demonstrated through experiments that a wearer of SR Arms can be trained to generate a body image that includes the SR Arms together with the four biological limbs. Human subjects are trained to activate SR Arms with MEG signals at a particular part of the muscles. Trained humans can control the six limbs, 4 biological and 2 artificial, independently. The presentation will be concluded with potentials of wearable SRLs and their social and economic impacts, ranging from increasing productivity and safety for factory, construction, and field workers to improved quality of life for elderly people and the handicapped as well as reduced workload for caregivers and clinicians.
Human Performance Augmentation Based on Physiological Measures during Haptic Interaction with a Co-Robot
Jun Ueda
Associate Professor of Mechanical Engineering, Georgia Institute of Technology
 Abstract: The current study aims to increase information available to a haptic device about a human operator during physical human-robot interaction (pHRI), in order to improve human performance (speed and accuracy of task, interaction port behavior or subjective “feel” for the operator). The main end goal is to develop novel control schemes with adaptive gain and parameter tuning according to changes in an operator’s physical state (i.e. arm stiffness) and/or cognitive state (i.e. operator intent). This research impacts any community interested in performance augmentation and adaptive shared control approaches, including advanced manufacturing, construction and medical industries. Research goals are 1) to understand the relationship between physiological measures such as electromyography (EMG) and system performance characteristics 2) to develop methodologies to achieve effective classification and prediction of operator physical and cognitive state during pHRI, 3) to implement and test the novel control schemes on a haptic co-robot during performance of simulated industrial tasks, as proof-of-concept. Using machine learning tools to tune parameters of a stochastic controller, this study seeks to proactively adjust the contact impedance between the operator and robotic device in order to achieve higher performance and stability.
Abstract: The current study aims to increase information available to a haptic device about a human operator during physical human-robot interaction (pHRI), in order to improve human performance (speed and accuracy of task, interaction port behavior or subjective “feel” for the operator). The main end goal is to develop novel control schemes with adaptive gain and parameter tuning according to changes in an operator’s physical state (i.e. arm stiffness) and/or cognitive state (i.e. operator intent). This research impacts any community interested in performance augmentation and adaptive shared control approaches, including advanced manufacturing, construction and medical industries. Research goals are 1) to understand the relationship between physiological measures such as electromyography (EMG) and system performance characteristics 2) to develop methodologies to achieve effective classification and prediction of operator physical and cognitive state during pHRI, 3) to implement and test the novel control schemes on a haptic co-robot during performance of simulated industrial tasks, as proof-of-concept. Using machine learning tools to tune parameters of a stochastic controller, this study seeks to proactively adjust the contact impedance between the operator and robotic device in order to achieve higher performance and stability.
Soft Wearable Robots to Assist Manipulation and Mobility
Conor Walsh
Associate Professor of Mechanical and Biomedical Engineering, Harvard University

Abstract: Next generation wearable robots will use soft materials such as textiles and elastomers to provide a more conformal, unobtrusive and compliant means to interface to the human body. These robots will augment the capabilities of healthy individuals (e.g. improved walking efficiency, increased grip strength) in addition to assisting patients who suffer from physical or neurological disorders. This talk will focus on two different projects that demonstrate the design and fabrication principles required to realize these systems. The first is a soft exosuit that that can apply assistive joint torques to synergistically propel the wearer forward and provide support to minimize loading on the musculoskeletal system. Advantages of the suit over traditional exoskeletons are that the wearer’s joints are unconstrained by external rigid structures, and the worn part of the suit is extremely light, which minimizes the suit’s unintentional interference with the body’s natural biomechanics. The second part of the talk will focus on the development of a soft robotic glove for hand rehabilitation that consists of a wearable textile with attached elastomeric fluid-powered actuators specially designed to match the natural movements of the fingers and thumb. A component of the research is to develop the knowledge and techniques required to design soft multi-material fluid-powered actuators. These actuators are of particular interest to the robotics community because they are lightweight, inexpensive, easily fabricated with emerging digital fabrication techniques and capable of producing complex three-dimensional outputs with simple control inputs. This is accomplished via a multi-step molding process where some combination of fillers (e.g. cloth, paper, particles and fibers) is integrated into a soft elastomeric matrix to create anisotropy in the bulk material properties. Upon pressurization, embedded channels or chambers in the soft actuator then expand in directions with the lowest stiffness and give rise to linear, bending, and twisting motions.
Assisting locomotion with unpowered devices
Steven H. Collins
Associate Professor of Mechanical Engineering, Carnegie Mellon University
 Abstract: Wearable devices intended to assist human locomotion are usually powered by motors and batteries. Yet many locomotor tasks, such as walking on level ground at steady speed, require no energy input in theory. This helps to explain the unusually economical gaits of passive-dynamic walking robots. In humans, muscles often expend energy to perform tasks that machines can accomplish passively, such as producing force. In this talk we will describe unpowered approaches to reducing the energy lost through muscle activity during gait. The first device is an ankle exoskeleton that engages a spring to offload plantarflexor muscles when the foot is on the ground. Although this mechanism is passive, it reduces the metabolic energy consumed by the body during walking. Second, we will present a new type of actuator that uses ultra-low-power, lightweight, low-voltage electroadhesive clutches to expand the controllability of unpowered devices. We will describe an application to an ankle exoskeleton with selectable stiffness, intended to provide assistance over a range of speeds and gaits. Finally, we will discuss design methods for this class of device using versatile exoskeleton emulator systems. The energetically-passive approach described here complements the established paradigm of active powering, and bodes well for the future of lightweight, highly-efficient, and relatively inexpensive exoskeletons that enhance or restore locomotor performance for humans.
Abstract: Wearable devices intended to assist human locomotion are usually powered by motors and batteries. Yet many locomotor tasks, such as walking on level ground at steady speed, require no energy input in theory. This helps to explain the unusually economical gaits of passive-dynamic walking robots. In humans, muscles often expend energy to perform tasks that machines can accomplish passively, such as producing force. In this talk we will describe unpowered approaches to reducing the energy lost through muscle activity during gait. The first device is an ankle exoskeleton that engages a spring to offload plantarflexor muscles when the foot is on the ground. Although this mechanism is passive, it reduces the metabolic energy consumed by the body during walking. Second, we will present a new type of actuator that uses ultra-low-power, lightweight, low-voltage electroadhesive clutches to expand the controllability of unpowered devices. We will describe an application to an ankle exoskeleton with selectable stiffness, intended to provide assistance over a range of speeds and gaits. Finally, we will discuss design methods for this class of device using versatile exoskeleton emulator systems. The energetically-passive approach described here complements the established paradigm of active powering, and bodes well for the future of lightweight, highly-efficient, and relatively inexpensive exoskeletons that enhance or restore locomotor performance for humans.
Binaural Stimulation for Working Memory Enhancement for Alzheimer Patients
Alexander Leonessa
Associate Professor of Mechanical Engineering, Virginia Institute of Technology
Abstract: Recent advancements in neuroimaging techniques have enabled investigating the connectivity of the brain by non-invasive recording and stimulation. Currently, a popular method for auditory stimulation is binaural beats which utilize a phenomenon that occurs within the cortex when two different tones are presented separately to each ear. In fact, a third phantom binaural beat, whose frequency is equal to the difference of the two presented tones, is produced within the Auditory Cortex.
Working memory is the system responsible for the online organization and processing of new and already-stored information. It is necessary for reasoning, comprehension, and successful goal-directed behavior. Humans exhibit a capacity limit on the ‘load’, or number of items, that can be actively maintained. Previous research has shown that an increase in electrocortical phase synchronization across the cortex facilitates neural communication, promotes neural plasticity, and supports working memory consolidation. By using binaural beat for auditory stimulation and selecting appropriate frequencies, auditory entrainment occurs which is characterized by the amplification and transmission of the binaural beat to other areas of the cerebral cortex. In turn, areas associated with visuo-spatial processing and working memory maintenance are activated.
We will show that binaural beat stimulation at 15Hz causes changes in behavior and cortical connectivity and produces a significant increase in working memory capacity when compared to no stimulation or stimulation using classical music. In addition, recorded EEG data is used to obtain cortical connectivity networks whose path weights are defined by the Phase Locking Value between channels. The average network clustering coefficient and global efficiency of the 15Hz binaural beat connectivity network is significantly higher than the connectivity network created when no sound is played. An important application of augmented working memory could be to persons with Alzheimer’s disease. One of the first stages of the disease is a decrease in working memory. Therefore, binaural beats could potentially reduce the decline of overall cognitive functions.
On the Design of Limb Exoskeletons for Metabolic Augmentation