Skip to content
Corresponding author: Federico Parietti (parietti at mit.edu)
Introduction
The Supernumerary Robotic Limbs (SRL) is a wearable robot which provides a human user with two additional robotic arms. The SRL is being used to assist wearers in complex tasks, to compensate for their weight while working in uncomfortable positions, and to augment their balance during walking. The robot has a wide range of applications, including the aircraft manufacturing industry, construction sites, elderly assistance and gait rehabilitation.
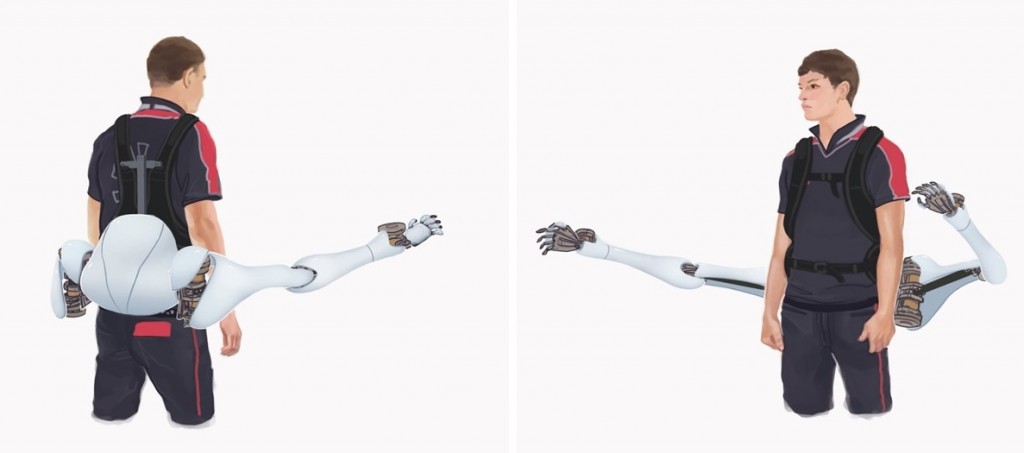 The Supernumerary Robotic Limbs (SRL) concept. The SRL augments the human body by providing two additional robotic limbs. This represents a new form of human augmentation.
The Supernumerary Robotic Limbs (SRL) concept. The SRL augments the human body by providing two additional robotic limbs. This represents a new form of human augmentation.
Design
The Supernumerary Robotic Limbs (SRL) is composed of four main parts. First, it is equipped with a harness that forms a comfortable yet firm interface with the human body. The harness is attached to the robot base, which follows the shape of the user’s hip and contains control electronics and power storage units. Lastly, two robotic limbs – each with three degrees of freedom – are connected to the base. The most important feature of the SRL is the independence of the robotic limbs from the natural limbs of the user. Unlike conventional exoskeletons, the SRL is not constrained to follow the kinematic configuration of the wearer. Independence allows the SRL to provide assistance by following optimal control laws and not simply by blindly following human motions. The SRL also enables the user to execute tasks that would be impossible to realize using only two arms or two legs. In this sense, the SRL can increase the range of motor skills available to the user. This represents a new form of human augmentation.
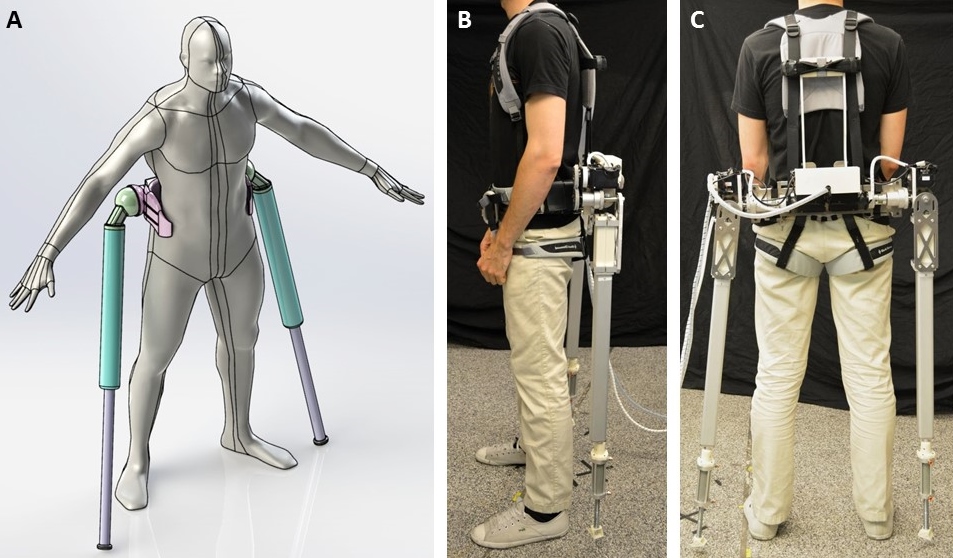 The Supernumerary Robotic Limbs (SRL) prototype. A) The structure of the SRL: the robot is worn at the hip of the user, and its limbs can act both as arms and as legs. Each robotic limb has 3dof: two rotational ones at its base, and one linear one in the limb itself. B) and C) Lateral and posterior view of the SRL prototype.
The Supernumerary Robotic Limbs (SRL) prototype. A) The structure of the SRL: the robot is worn at the hip of the user, and its limbs can act both as arms and as legs. Each robotic limb has 3dof: two rotational ones at its base, and one linear one in the limb itself. B) and C) Lateral and posterior view of the SRL prototype.
Research
The research on the Supernumerary Robotic Limbs started from the biomechanical modeling of the effects of the robot on the human user [Davenport 2012]. In this work, we introduced the concept of the SRL and its first prototype. Aircraft manufacturing was considered as a first case study for the use of the robot. With a series of lifting experiments, we reconstructed the human joint torques generated when static manipulation tasks are performed in collaboration with the SRL. The results showed that the SRL can reduce the overall exertion of the user during manipulation tasks, because it shifts the load away from the arms and spine.
A second study on the SRL considered the unique configuration of the robot, which is a manipulator on a compliant and unpredictable base (the user) [Parietti 2013]. We analyzed the dynamics of the human-SRL system and developed a Kalman filter approach to estimate the state of the robot despite the involuntary wearer’s motion. The second part of this study introduced the “bracing strategy”, which consists of using the robotic limbs to grasp the environment, providing support to the wearer and increasing the accuracy of the manufacturing task. Bracing can also be used to shape the compliance at the hip of the user, providing the specific assistance required by the task at hand.
 Applications of the Supernumerary Robotic Limbs. The pictures have been taken with various prototypes of the robot. A) Assisting a drilling task: the worker controls the drill, while the robot holds a part in place and vacuums the carbon chips. B) Assisting an assembly task: the worker tightens a bolt on a beam held in place by the robot. The SRL also supplies new bolts to the user. C) Workload support: the user works in an uncomfortable (overhead) position, while the robot supports part of his weight by bracing his body against the aircraft structure. D) Increasing worker precision: the SRL stabilizes the body of the user by grasping the environment, and guides the power drill.
Applications of the Supernumerary Robotic Limbs. The pictures have been taken with various prototypes of the robot. A) Assisting a drilling task: the worker controls the drill, while the robot holds a part in place and vacuums the carbon chips. B) Assisting an assembly task: the worker tightens a bolt on a beam held in place by the robot. The SRL also supplies new bolts to the user. C) Workload support: the user works in an uncomfortable (overhead) position, while the robot supports part of his weight by bracing his body against the aircraft structure. D) Increasing worker precision: the SRL stabilizes the body of the user by grasping the environment, and guides the power drill.
The first aircraft manufacturing task in which the SRL has been used to support the user is drilling. This task is challenging, because it requires high positional accuracy and in some cases coordination between different workers. If two human workers are collaborating to perform a task, one will assume the role of the leader and the other one will be the follower. By recording the motion and the forces involved in this collaborative task, it is possible to develop a control strategy that enables the SRL to act as the follower, compensating for the weight of a part while the wearer drills a hole in it [Llorens-Bonilla 2012]. It is also possible to combine the bracing strategy with the drilling assistance function [Parietti 2014]. In this case, the SRL grasps the environment with one robotic limb and compensates part of the weight of the user. At the same time, the other robotic limb indicates to the worker the exact drilling location, and guides the drill bit by precisely positioning and firmly holding a bushing on the aircraft structure.
Additional studies have characterized in detail the bracing strategy, fully revealing its potential to enhance the safety and reduce the workload of aircraft manufacturing and construction workers. The initial paper on this topic modeled the bracing strategy in the sagittal plane, finding the SRL configurations that allow to provide maximum support to the user while minimizing robot joint torques [Parietti 2014]. It is important to point out that this optimization process considers the full workspace of the SRL, because the robot is free to contact the environment in any location within its reach. The independence of the SRL from the human thus allows the robot to provide assistance more efficiently than a conventional exoskeleton. Recent research on this topic has led to the 3D generalization of the bracing strategy. The SRL is now able to select optimal bracing configurations in its full workspace volume, considering all of the available contact points with the environment. Besides efficiently supporting the weight of the user, the algorithm also identifies the controller gains at the robot joints which allow to achieve a desired shape for the compliance matrix at the hip of the user. This allows the SRL not only to reduce the workload of the user, but also to stabilize the chosen kinematic configuration by impedance shaping.
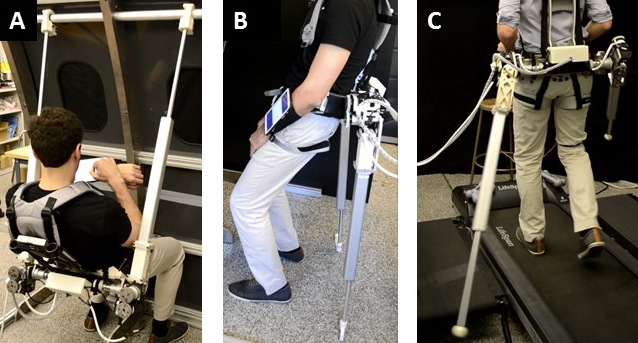 Applications of the Supernumerary Robotic Limbs. A) and B) Workload support: the robot supports the user’s weight and follows his motions. C) Balance augmentation: the robotic limbs coordinate with natural human walking, augmenting the user’s balance.
Applications of the Supernumerary Robotic Limbs. A) and B) Workload support: the robot supports the user’s weight and follows his motions. C) Balance augmentation: the robotic limbs coordinate with natural human walking, augmenting the user’s balance.
The latest research on the SRL has focused on the use of the robot as an assistive device during dynamic locomotion [Parietti 2015]. The robotic limbs can be used as legs, making contact with the ground as the user moves. Since they are independent from the human, the robotic limbs do not obstacle natural locomotion and are free to optimize their configuration to provide maximum stability or support. Moreover, unlike traditional assistive devices (canes, crutches, walkers), the SRL leaves torso and arms free and unloaded. We developed gait patterns that coordinate the robotic limbs with the human legs, augmenting balance by maximizing the area of the support polygon in every phase of the gait cycle. The SRL is able to seamlessly coordinate with the wearer, whose leg motions are measured by a small accelerometer worn through a knee strap.
Publications
-
F. Parietti, K. Chan, B. Hunter and H. Asada, Design and Control of Supernumerary Robotic Limbs for Balance Augmentation, IEEE International Conference on Robotics and Automation (2015 ICRA), Seattle, USA, May 2015.
-
F. Parietti and H. Asada, Supernumerary Robotic Limbs for Aircraft Fuselage Assembly: Body Stabilization and Guidance by Bracing, IEEE International Conference on Robotics and Automation (2014 ICRA), Hong Kong, China, May 2014.
-
F. Parietti and H. Asada, Bracing the Human Body with Supernumerary Robotic Limbs for Physical Assistance and Load Reduction, IEEE International Conference on Robotics and Automation (2014 ICRA), Hong Kong, China, May 2014.
-
F. Parietti and H. Asada, Dynamic Analysis and State Estimation for Wearable Robotic Limbs Subject to Human-Induced Disturbances, IEEE International Conference on Robotics and Automation (ICRA 2013), Karlsruhe, Germany, May 2013.
-
C. Davenport, F. Parietti, and H. Asada, Design and Biomechanical Analysis of Supernumerary Robotic Limbs, ASME Dynamic Systems and Control Conference (DSCC 2012), Fort Lauderdale, Florida, USA, 2012.
-
B. Llorens-Bonilla, F. Parietti, and H. Asada, Demonstration-Based Control of Supernumerary Robotic Limbs, IEEE International Conference on Intelligent Robots and Systems (IROS 2012), Vila Moura, Portugal, 2012.