Corresponding author: Faye Wu (yfwu {at} mit {dot} edu)
Introduction
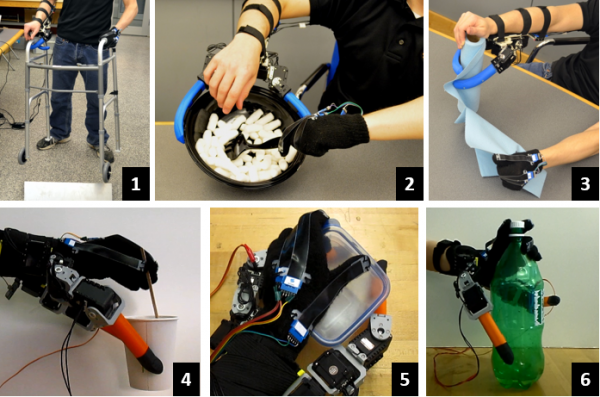
The Supernumerary Robotic Fingers (SR Fingers) are wearable robots developed to enable stroke survivors, and other patients with limb impairments, to regain the strength and range of motion to lead more independent lives. Specifically for hemiparetic or hemiplegic patients who are left with a single operational hand, the wrist-mounted SR Fingers can be used to assist the patients in performing activities of daily living (ADLs) that are usually difficult to execute with one hand
The SR Fingers have the potential to compensate for manipulative disabilities or enhance the capabilities of existing limbs, opening possibilities for a wide range of applications. For example, if the patients have some functionality left in their weakened limb, they can wear the SR Fingers on the impaired arm and use it to assist with simple bi-manual tasks. Alternatively, if the user’s impaired arm is not functional at all, the SR Fingers can be mounted on the remaining healthy arm to allow the user to perform tasks that usually require two hands with a single hand.
The SR Fingers can compensate for users’ upper limb disabilities and assist them in performing simple bi-manual tasks (1-3). Alternatively, the SR Fingers can also augment the functionalities of the users’ healthy limb, allowing them to perform tasks with a single hand (4-6).
Research
One key technical challenge is to integrate the motion of the SR Fingers with that of the human fingers so the human can come to perceive the robotic fingers as an extension of his/her own body, although they are biologically uncoupled. Compared to conventional control between a separate, self-standing robot and a human, more implicit and intuitively coordinated control is required for the SR Fingers. Therefore, the SR Fingers must have certain features and functionalities that enable the robot to integrate with and adapt to natural human actions.
A data-driven method for communicating with and controlling SR Fingers for basic grasping behaviors was developed [1][2]. Based on Principal Component Analysis (PCA), it was determined that there exists a correlation of posture between joints of the five human fingers and joints of the two SR Fingers when grasping an object together. Utilizing this correlation to control the SR Fingers for grasping various objects in concert with the human fingers, the functional relationship between the measured posture of the human fingers and the desired posture of the SR Fingers is extracted via Partial Least Squares Regression (PLSR). The PLSR predicted SR Finger postures are represented in lower dimensional vector space, given by a combination of several latent variables corresponding to the measured human finger posture. Someone wearing the SR Fingers can thus control the robot by simply approaching an object and taking a particular posture appropriate for grasping the object. The robot would respond by taking a posture predicted by PLSR, which implicitly evokes the way that the human wanted the SR Fingers to grasp the object as demonstrated through the grasp experiment. Methods on improving the performance of synergy based control, including eliminating indistinguishable behaviors and performing data clustering using Genetic Algorithm, have been explored [6].
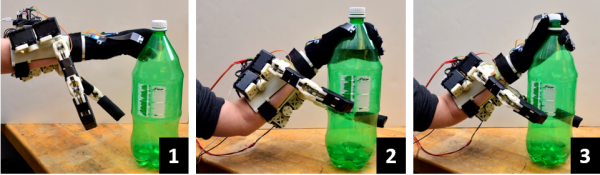
Linking the motion of the SR Fingers with that of the human fingers is a basic behavior of these wearable robotic fingers. As the human intends to execute more dexterous movements after grasping, for example unscrewing the cap of a soda bottle, this synergy link needs to be disconnected or modified depending on the subsequent manipulation task. This type of Hold and Manipulate (H&M) tasks, which constitutes the majority of daily chores, requires communication and control methods that go beyond basic grasp synergy. To that end, body movements that do not interfere with the execution of the manipulative task is used to switch between discrete states of linked and unlinked human-robot motion. Alternatively, the same redundant body movement can also be used to modify grasp synergy for continuous control with multiple task goals. A prototype was designed to measures elbow movement, which does not affect the pose of the hand, with an IMU to enable SR Finger assisted H&M tasks [3].
Movement in the elbow may be used to control the SR Fingers to execute more complex tasks. (1) Hand wearing the SR Fingers approaches the object; (2) Elbow is bent downward to freeze SR Fingers’ posture while holding the object; (3) Human fingers manipulate the object while the SR Fingers hold it. Reversed this sequence to release the object when task is completed.
The latest research on the control of the SR Fingers is focused on modeling the hybrid human-robotic hand, which may be a nonlinear system with unknown parameters and structure, in latent variable space based on experimental data [7] and performing impedance control in the latent variable space to achieve more secure and natural interaction with objects. Other research on the SR Fingers include optimizing finger morphology and attachment configuration, as well as incorporating compliant or underactuated elements, to improve grasp security and aid patients in more complex tasks. An SR Finger prototype that consists of modular, pneumatically actuated joints and phalanges with variable stiffness is currently being investigated [4]. Additionally, in collaboration with the Spaulding Rehabilitation Hospital, a prototype SR Fingers is also being developed as a rehabilitation tool during early phase of ADL training [5].
Publications
F. Y. Wu and H. H. Asada, “Bio-Artificial Synergies for Grasp Posture Control of Supernumerary Robotic Fingers,” in Proceedings of Robotics: Science and Systems (RSS), Berkeley, CA, Jul. 2014.
F. Wu and H. H. Asada, “Supernumerary Robotic Fingers: an Alternative Upper Limb Prosthesis,” in Proceedings of ASME Dynamic Systems and Control Conference (DSCC), San Antonio, TX, Oct. 2014.
F. Y. Wu and H. H. Asada, “‘Hold-and-Manipulate’ with a Single Hand Being Assisted by Wearable Extra Fingers,” in Proceedings of IEEE International Conference on Robotics and Automation (ICRA), Seattle, WA, Jun. 2015, pp. 6205 – 6212.
F. L. Hammond, F. Wu, and H. H. Asada, “Variable Stiffness Pneumatic Structures for Wearable Supernumerary Robotic Devices,” in International Symposium of Robotics Research, Sestri Levante, Italy, Sept. 2015.
T. Ort, F. Wu, N. C. Hensel, and H. H. Asada, “Supernumerary Robotic Fingers as a Therapeutic Device for Hemiparetic Patients,” in Proceedings of ASME Dynamic Systems and Control Conference (DSCC), Columbus, OH, Oct. 2015, DSCC2015–9945.
F. Y. Wu and H. H. Asada, “Implicit and Intuitive Grasp Posture Control for Wearable Robotic Fingers : a Data Driven Method Using Partial Least Squares,” IEEE Trans. Robot., vol. 32, no. 1, pp.176-186, Feb. 2016.
H.H. Asada, F. Wu, A. Girard, and M. Mayalu, “A Data-Driven Approach to Precise Linearization of Nonlinear Dynamical Systems in Augmented Latent Space,” in Proceedings of American Control Conference (ACC), Boston, July 2016.