This year the d’Arbeloff lab had a large number of accepted submissions to the 2020 IEEE International Conference on Robotics and Automation (ICRA 2020). As a lab, we had a record-breaking 6 papers accepted and presented at the virtual conference. On behalf of the whole lab, congratulations to Jacob, Dan, Filippos, Ryan, Hiroshi, and Haruhiko for the accomplishment.
D. Gonzalez – Passive Quadrupedal Gait Synchronization for Extra Robotics Legs using a Dynamically Coupled Double Rimless Wheel Model
H. Matsuo – Design of a Novel Multiple-DOF Extendable Arm with Rigid Components Inspired by a Deployable Origami Structure
R. Sanzimier – A Data-Driven Approach to Prediction and Optimal Bucket-Filling Control for Autonomous Excavators
J. Guggenheim – Leveraging the Human Operator in the Design and Control of Supernumerary Robotic Limbs
H. Eto – Development of a Wheeled Wall-Climbing Robot with a Shape-Adaptive Magnetic Adhesion Mechanism
Congratulations to Phillip Daniel for his recent publication!
In ‘Stable Crawling Policy for Wearable SuperLimbs Attached to a Human with Tuned Impedance’, Phillip demonstrates a control algorithm allowing for a human model to crawl using a pair of supernumerary robotic limbs. Verifying the walking policy that he developed using simulated experiments, Phillip’s work is the first, that we are aware of, to address cooperative crawling between a human and a wearable robotic system with state feedback.
The full paper can be found in IROS 2020’s Conference Proceedings.
Daniel, Phillip, Asada, Harry, “Stable Walking Policy for Wearable SuperLimbs Attached to a Human with Tuned Impedance,” IEEE/RSJ International Conference on Intelligent Robots and Systems, 2020. Las Vegas, NV. 25-29 Oct 2020
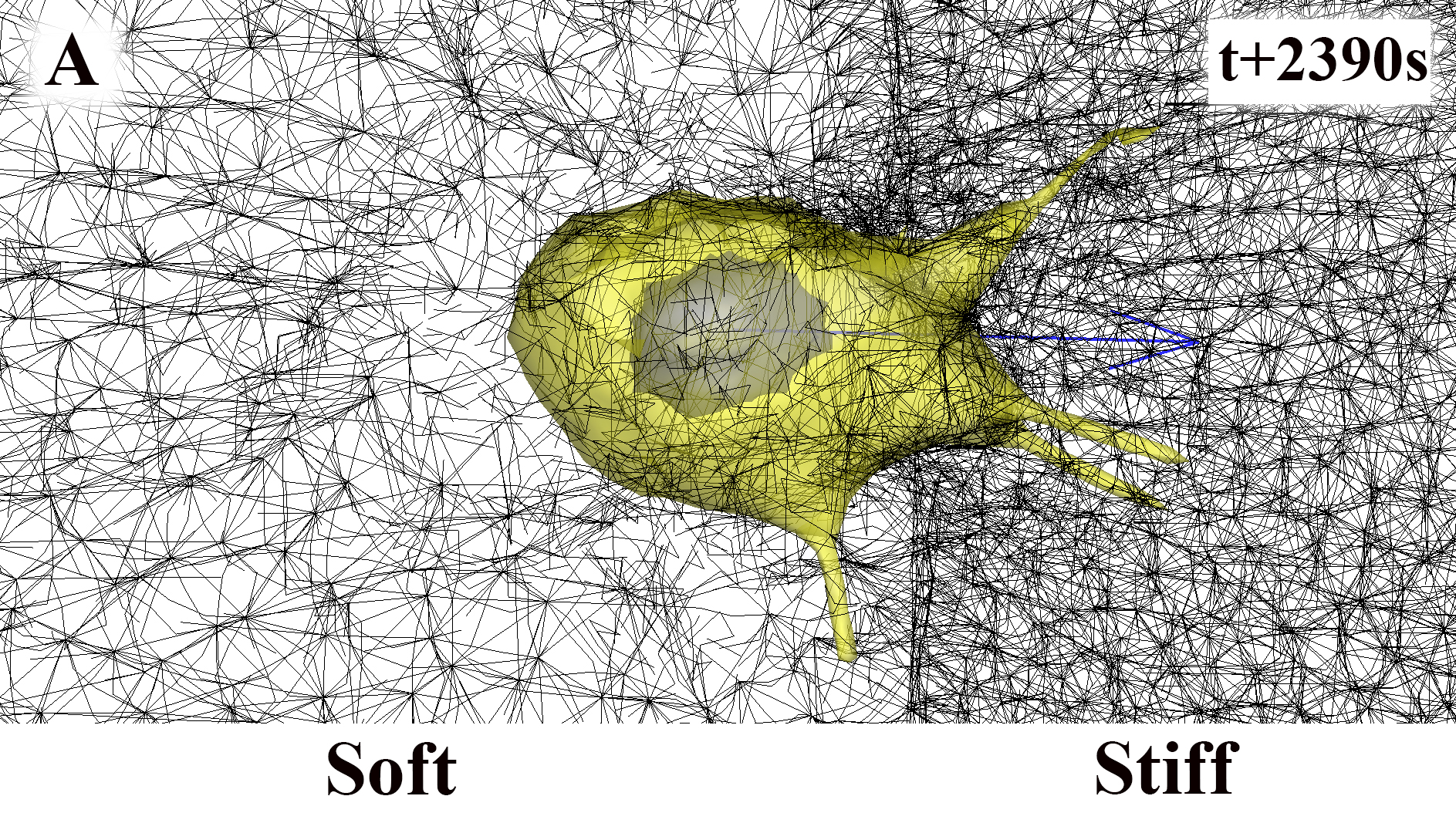
This simulation shows a #cancer cell migrating from a soft location in the extracellular matrix to a stiff location. The video uses a new tool to understand the mechanics of metastasis described in a @PNASNews study https://t.co/5hDJWvdfoLpic.twitter.com/gRFexofJFD
Min-Cheol’s paper “Computational Modeling of Three-Dimensional ECM-Rigidity Sensing to Guide Directed Cell Migration” has published online at: www.pnas.org.