Robotic Straps
* Full project website to go live soon. Until then, please refer to this TUTORIAL on softrobotics.io for initial fabrication files/instructions, and contact kbarhydt@mit.edu for any questions/comments related to this project.
High-Strength, Highly-Flexible Robotic Straps for Harnessing, Lifting, and Transferring Humans
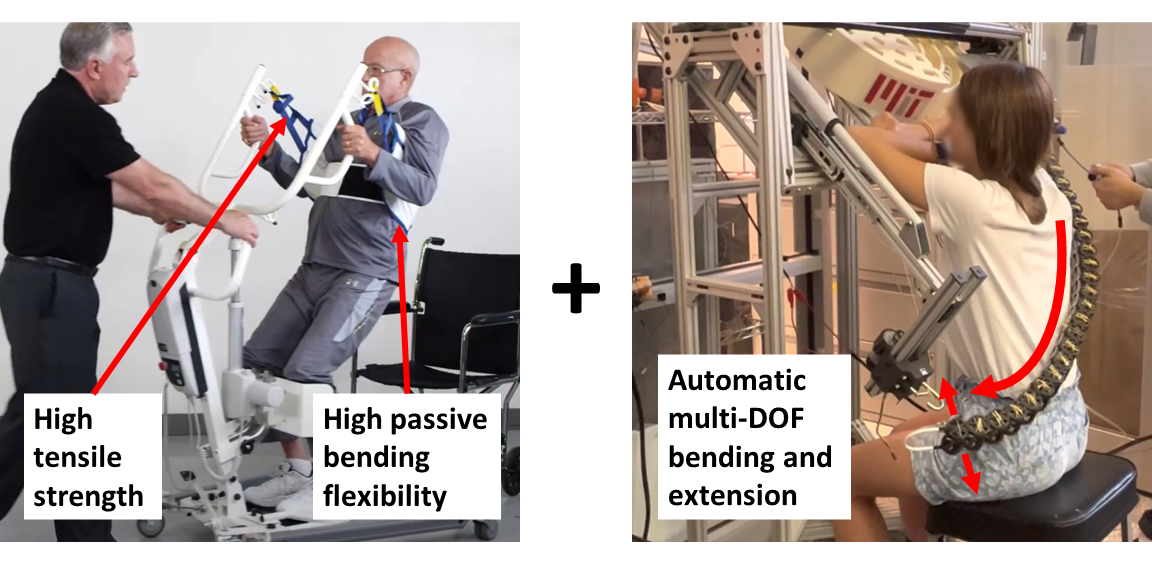
Safely harnessing and lifting humans for transfer is a challenging unsolved problem for current robots because of the high forces and gentle interaction necessary to do so. Humans are heavy, delicate, deformable, and vary widely in shape and pose. Standard robotic manipulators and end-effectors cannot achieve sufficiently gentle human interaction while applying the high forces needed to lift the body effectively, although many high impact tasks depend on this functionality. Straps, however, are highly beneficial for manually performing this task primarily because of their simultaneously high tensile strength and high compliant bending flexibility, in that (1) the high tensile strength allows for load bearing capacities great enough to lift the full weight of the human, and (2) the high bending flexibility allows for the high passive compliance and conformity needed to safely distribute these large forces across the body.
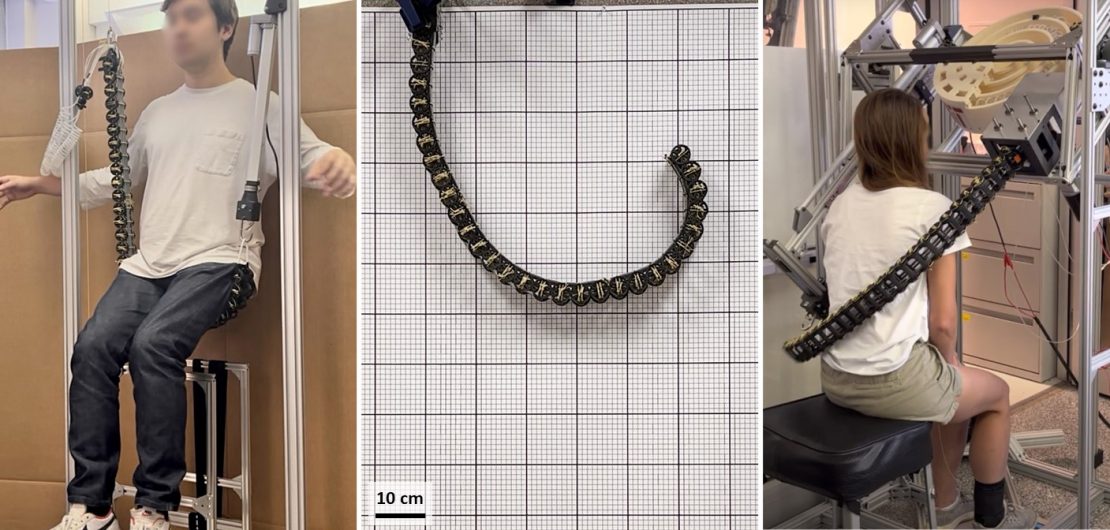
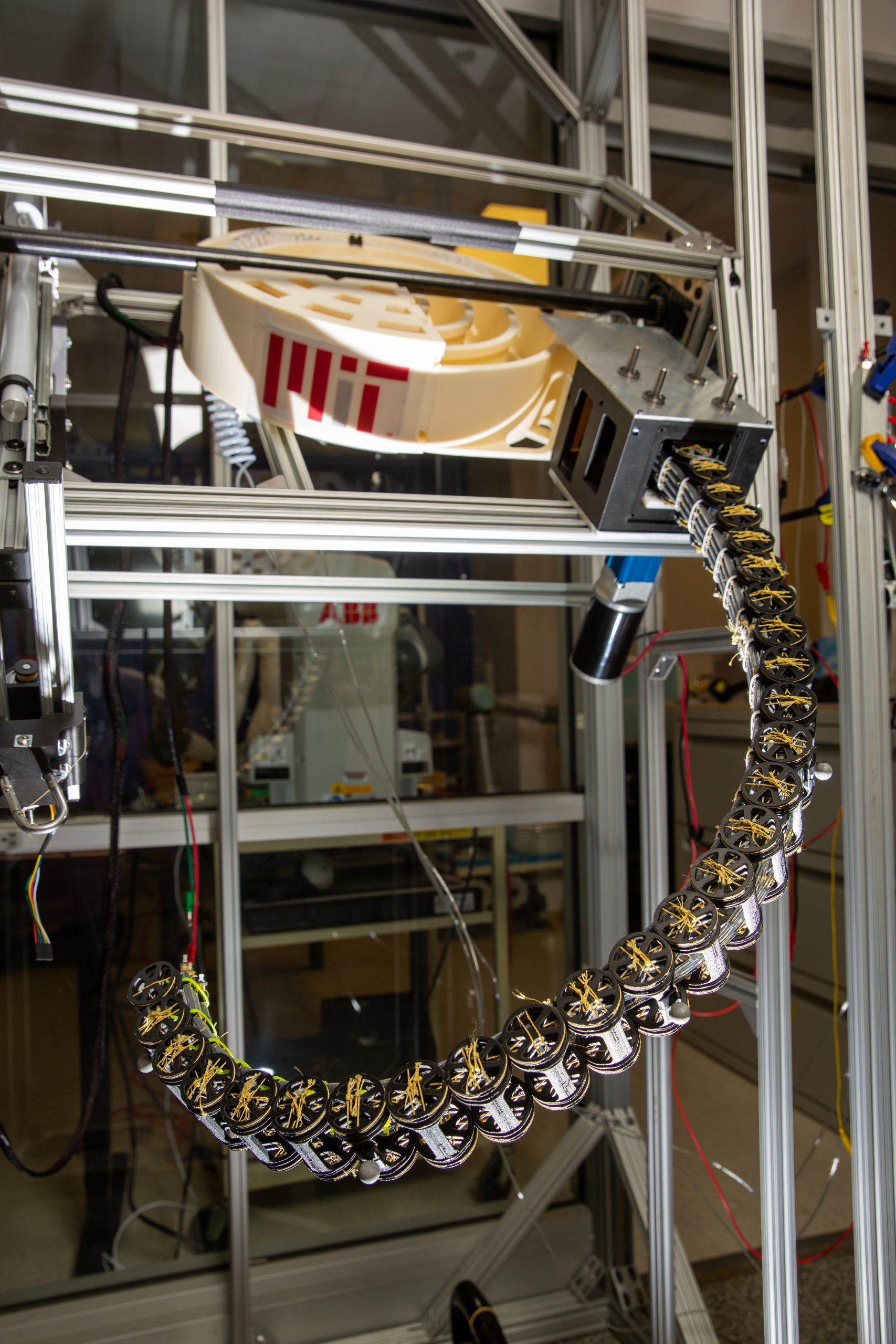
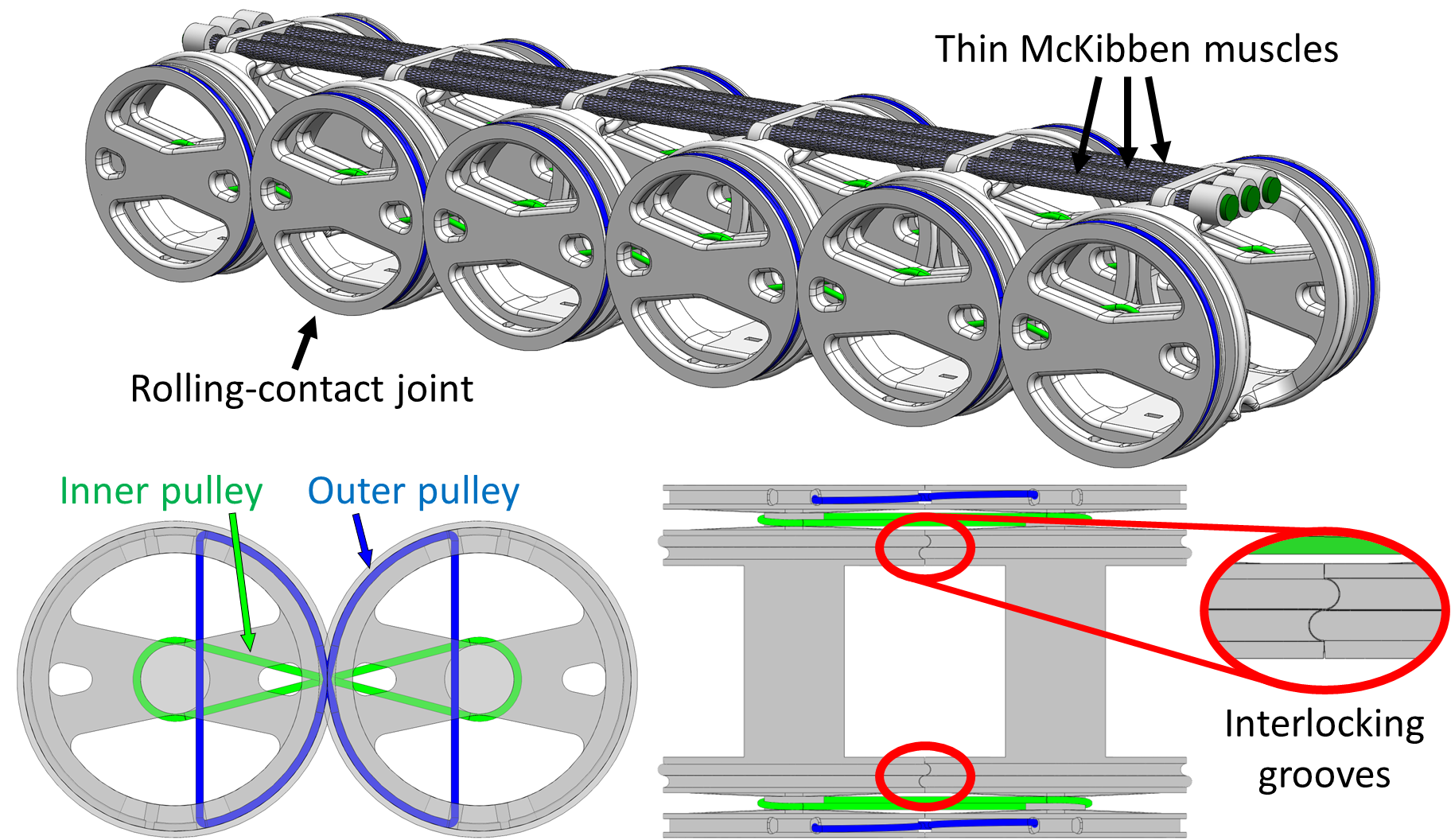
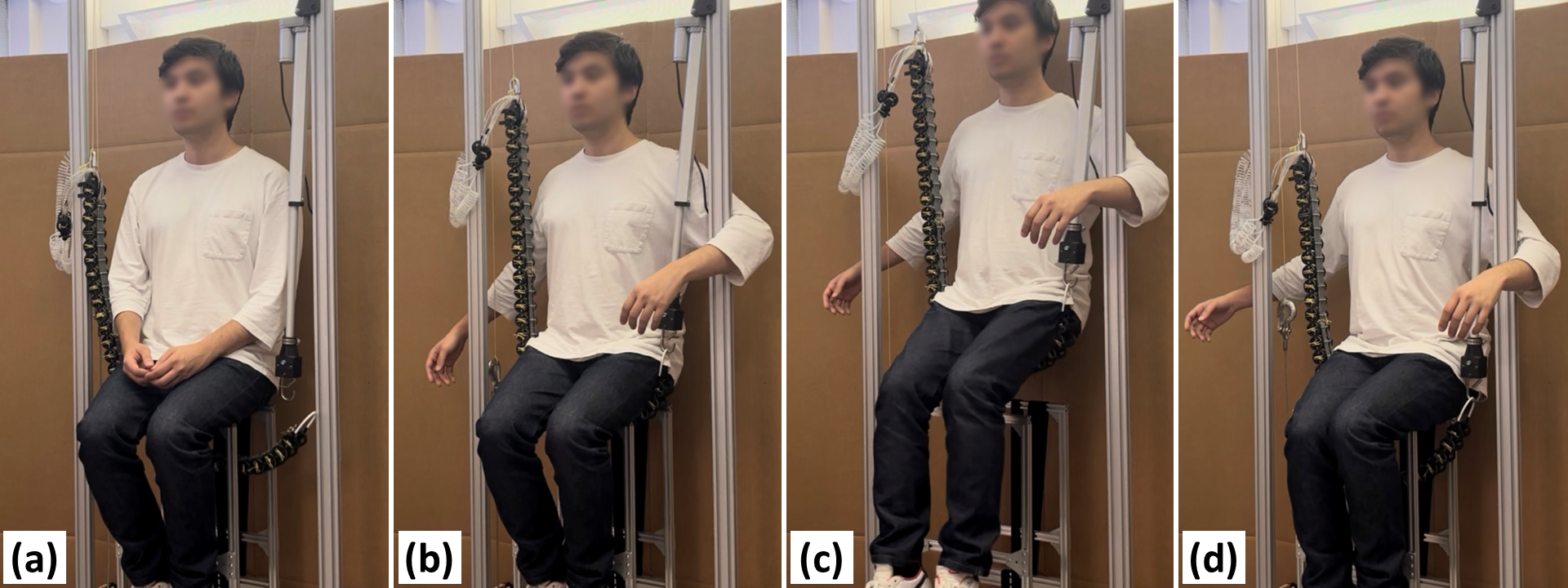
We present the Robotic Strap, a novel concept and design for a new type of manipulator that can passively harness and lift humans safely as straps can, as well as actively articulate itself around the human into the desired harnessing configurations. The Robotic Strap manipulator is the first robot to demonstrate automatic harnessing and lifting of a human above the ground. The design is characterized by the high tensile strength and bending flexibility of straps, and its implementation consists of a hyper-articulated backbone with rolling-contact joints and embedded soft pneumatic artificial muscles. In our paper, “A High-Strength, Highly-Flexible Robotic Strap for Harnessing, Lifting, and Transferring Humans“, we present the concept, framework, realization, and implementation of the Robotic Strap design, as well as model and experimentally validate the key characteristics. The prototype has a tensile load capacity of 1314.0 N, a maximum joint bending resistance of <0.1 Nm, and successfully demonstrated safe and effective harnessing and lifting of three human participants without any manual intervention. This new manipulator design paradigm unlocks significant advances in robotic handling of heavy yet gentle objects, enabling new capabilities in important applications such as elderly care, occupational therapy, emergency medical response, search and rescue, ergonomic support for manual labor, and so forth.
Publications
- K. Barhydt and H. H. Asada, “A High-Strength, Highly-Flexible Robotic Strap for Harnessing, Lifting, and Transferring Humans,” in IEEE Robotics and Automation Letters, vol. 8, no. 4, pp. 2110-2117, April 2023, doi: 10.1109/LRA.2023.3246389. [link]